语义分割
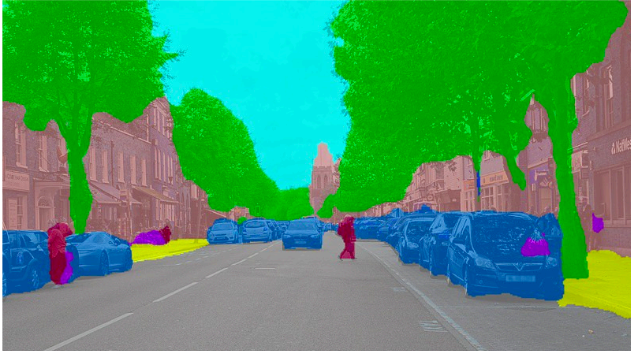





语义分割是计算机视觉中的一个关键技术,它涉及对图像中的每个像素进行类别划分,从而识别出图像中的不同物体或区域。具体来说,语义分割就是按照“语义”给图像上目标类别中的每一点打上一个标签,使得不同种类的东西在图像上被区分开来,可以理解为像素级别的分类任务。
语义分割的原理通常基于深度神经网络,特别是卷积神经网络(CNN)。在语义分割中,算法首先对输入图像进行特征提取,然后使用分类器对每个像素进行分类,从而得到每个像素的类别标签。与目标检测算法不同,语义分割算法不需要对图像中的物体进行边界框的检测和定位,而是通过对每个像素进行分类来识别不同区域和对象。
语义分割的应用非常广泛,包括但不限于以下几个方面:
- 自动驾驶:在自动驾驶系统中,语义分割可以用于道路线识别和轨迹规划,确保车辆正确行驶在各车道内,并理解环境中的各种物体,如路面、建筑和行人,以确保安全。
- 医学影像分析:在医学影像处理中,语义分割技术可以对不同器官部位进行分割,如心脏、肺和锁骨等,从而辅助医生进行病情诊断和治疗方案制定。
- 机器人视觉:机器人可以利用语义分割技术对周围环境进行感知,从而实现智能导航、物品抓取等功能。在机器人的自主定位和运动规划中,语义分割起到了关键作用。
- 视频监控系统:语义分割技术可以增强视频监控系统的警戒能力,对监测对象进行准确地分类和识别,进而进行行为分析和预警。
此外,语义分割还可以应用于增强现实和虚拟现实技术中,实现对场景的理解和沉浸式体验。随着技术的不断进步,语义分割的应用领域将会更加广泛。
在优化语义分割模型方面,常用的损失函数包括Soft Jaccard损失、Soft Dice损失和Soft Tversky损失等。然而,这些损失函数在处理软标签时存在一些问题,因此研究人员提出了JDT损失函数作为解决方案。JDT损失函数是原有损失函数的变体,能够完全兼容软标签,并在多个场景下提高了模型的准确性和校准性。
语义分割的数据集包含大量带有像素级标签的图像,用于训练语义分割模型。这些标签用于指示图像中每个像素所属的类别。以下是一些常用的语义分割数据集:
- PASCAL VOC:PASCAL VOC是一个包含多个计算机视觉任务的基准数据集,其中也包括语义分割任务。它包含数千张带有标签的图像,涵盖了20个不同的对象类别。
- Cityscapes:Cityscapes是一个专注于城市街景的语义分割数据集。它包含来自50个不同城市的街景图像,每个图像都提供了精细的像素级标签,涵盖了道路、建筑物、车辆、行人等不同的类别。
- ADE20K:ADE20K是一个包含超过2万个图像的大型场景解析数据集。它涵盖了广泛的场景和对象类别,每个图像都提供了详细的像素级标签。
- COCO:COCO(Common Objects in Context)是一个大型的计算机视觉数据集,也包含语义分割任务。它包含超过30万个图像,涵盖了80个不同的对象类别。
- CamVid:CamVid是一个较早的语义分割数据集,它包含从驾驶汽车时拍摄的视频中提取的数百个图像帧。这些图像被标记为多个不同的类别,如道路、建筑物、车辆、行人等。
- Stanford Background Dataset:这个数据集包含从现有公共数据集中选择的715个图像,具有大约320×240像素。它包含几个标签种类,如天空、树、道路、草、水、建筑物、山脉和前景物体。
- Sift Flow Dataset:这个数据集包含2688张图片和33个不同的标签。这些图像涵盖了多种不同的场景和对象类别。
在训练语义分割模型时,这些数据集通常被用来评估模型的性能,并与不同的算法进行比较。通过使用这些数据集,研究人员可以开发出更准确、更可靠的语义分割模型,以应用于各种计算机视觉任务中。
语义分割(Semantic Segmentation)是计算机视觉中的一项重要任务,它的目标是为图像中的每个像素分配一个预定义的类别标签。与图像分类(为整个图像分配一个标签)和目标检测(识别和定位图像中的目标)不同,语义分割要求算法对图像进行更精细的理解,以区分同一类别中的不同对象实例(这通常被称为实例分割,但语义分割通常不考虑实例级别的区分)。
在语义分割中,模型通常会输出一个与输入图像大小相同的矩阵(或称为掩码、标签图或分割图),其中的每个像素值代表该像素所属的类别。这些类别通常包括背景、不同的物体类别等。
以下是一些实现语义分割的常用方法:
- 全卷积网络(Fully Convolutional Networks, FCN):FCN是语义分割任务中的开创性工作之一。它通过移除传统卷积网络中的全连接层,使得网络可以处理任意大小的输入,并输出与输入大小相同的分割图。
- U-Net:U-Net是一种在医学图像分割中广泛使用的网络结构。它采用了一种编码器-解码器架构,其中编码器用于提取图像特征,解码器则用于逐步恢复图像的分辨率并产生分割图。U-Net的一个关键特点是其跳跃连接(skip connections),它允许解码器在恢复分辨率时利用编码器中的低级特征。
- DeepLab:DeepLab是一系列用于语义分割的深度学习模型。它引入了空洞卷积(atrous convolution,也称为扩张卷积或膨胀卷积)来增大感受野,并使用条件随机场(Conditional Random Field, CRF)作为后处理步骤来细化分割结果。
- Mask R-CNN:虽然Mask R-CNN主要被用于实例分割任务,但它也可以用于语义分割。Mask R-CNN是一个两阶段的目标检测器,它在Faster R-CNN的基础上添加了一个并行的分支来预测目标掩码。在语义分割场景中,可以简单地忽略实例级别的区分,只保留类别级别的掩码。
- Transformer-based Models:近年来,基于Transformer的模型(如Vision Transformer, ViT)在图像分类任务中取得了显著的性能提升。这些模型也被应用于语义分割任务中,例如SETR(Segmentation Transformer)就是一个基于Transformer的语义分割模型。
语义分割在自动驾驶、医学影像分析、机器人视觉、增强现实等领域有着广泛的应用前景。