一、原理介绍
为改进传统PI转速环电流环控制器易超调、抗干扰性能差的问题,转速环采用一阶滑模控制器,电流环采用二阶滑模控制器。
二、仿真验证
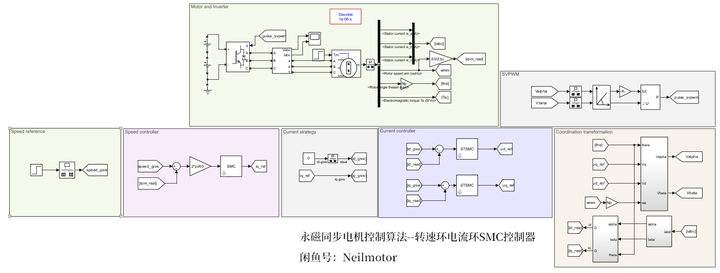
在MATLAB/simulink里面验证所提算法,采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
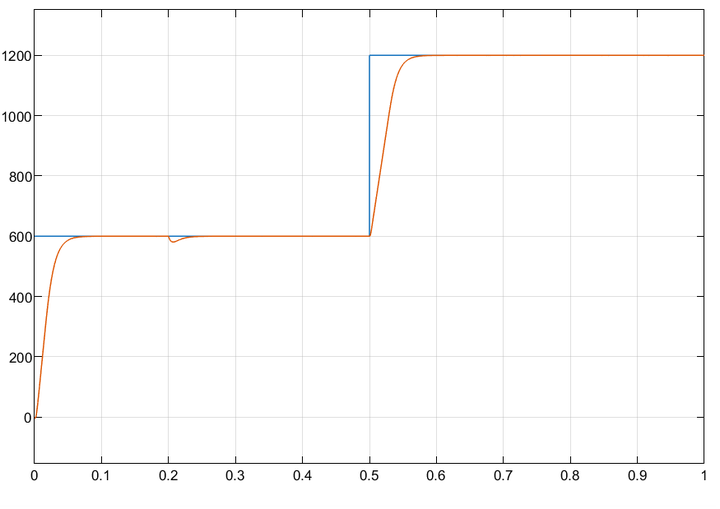
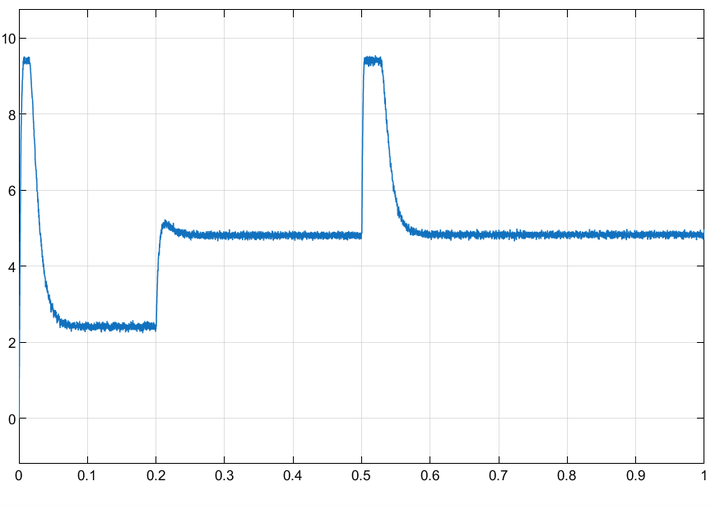
2.1转速
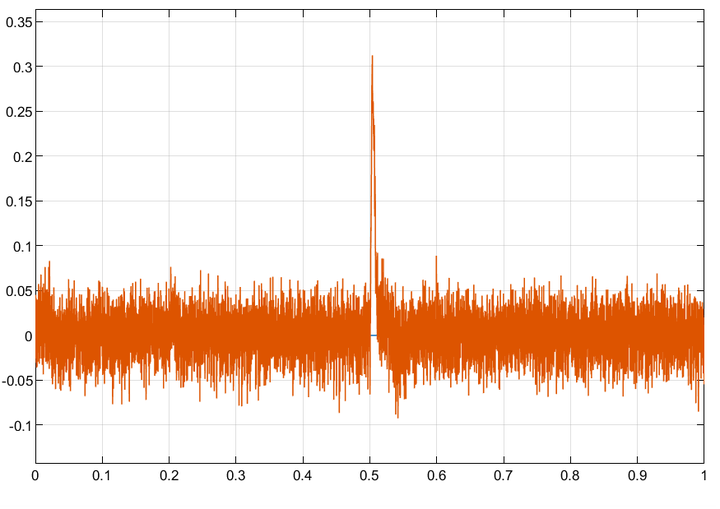
2.2 d轴电流
2.3 q轴电流
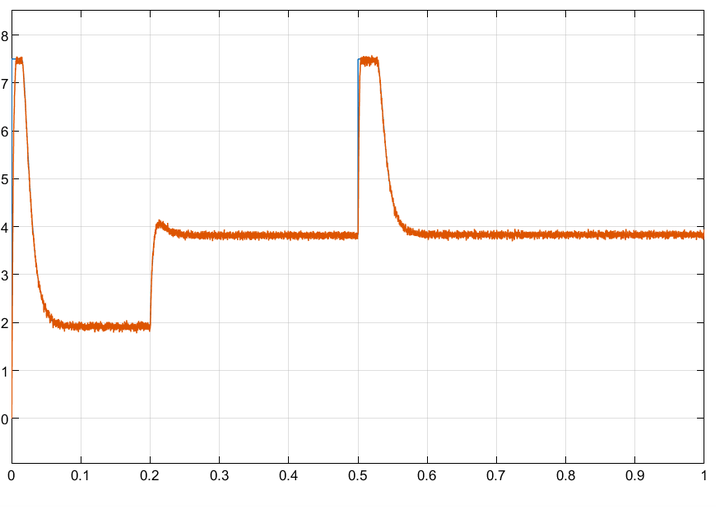
2.4 电磁转矩
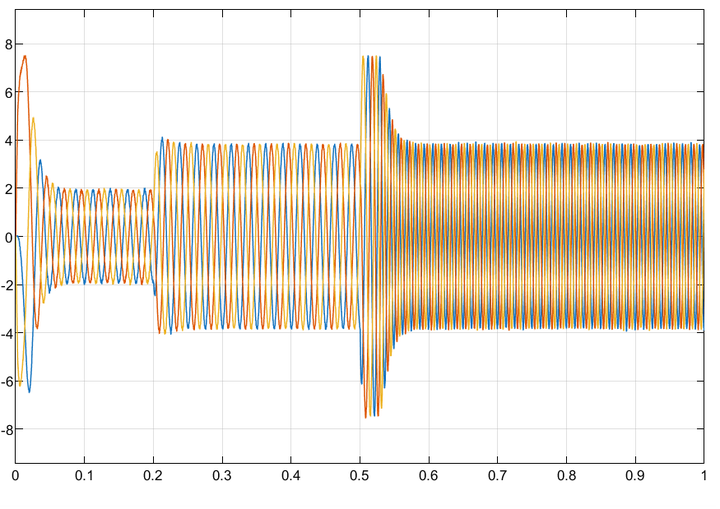
2.5 三相电流
为改进传统PI转速环电流环控制器易超调、抗干扰性能差的问题,转速环采用一阶滑模控制器,电流环采用二阶滑模控制器。
在MATLAB/simulink里面验证所提算法,采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
版权声明:
本网仅为发布的内容提供存储空间,不对发表、转载的内容提供任何形式的保证。凡本网注明“来源:XXX网络”的作品,均转载自其它媒体,著作权归作者所有,商业转载请联系作者获得授权,非商业转载请注明出处。
我们尊重并感谢每一位作者,均已注明文章来源和作者。如因作品内容、版权或其它问题,请及时与我们联系,联系邮箱:809451989@qq.com,投稿邮箱:809451989@qq.com