目录
一、安装 Ubuntu Linux 20.04系统
1.1 安装前准备工作
1.1.1 镜像下载
1.1.2 创建新的虚拟机
二、编译内核源码
2.1 下载源码
2.2 指定编译工具
2.3 将根文件系统放到源码根目录
2.4 配置生成.config
2.5 编译
三、安装aarch64交叉编译工具
四、安装QEMU
五、创建基于 Ubuntu Linux 的根文件系统
5.1 BusyBox构建根系文件系统
5.1.1 下载BusyBox源码
5.1.2 制定编译工具链
5.1.3 配置编译BusyBox
5.1.4 创建需要的目录
六、启动QEMU
6.1 创建共享文件目录
6.2 运行QEMU模拟器
6.3 编译一个简单的内核模块并在QEMU上运行
七、总结
一、安装 Ubuntu Linux 20.04系统
1.1 安装前准备工作
1.1.1 镜像下载
下载地址:https://mirrors.tuna.tsinghua.edu.cn/ubuntu-releases/20.04.4/
选择Ubuntu-releases
选择20.04
1.1.2 创建新的虚拟机
点击创建新的虚拟机,选择镜像文件、安装位置等
安装完成,界面如下,输入密码
快照 Ubuntu快照是一种自包含的软件包格式,它将应用程序及其依赖项打包在一起,使得软件可以在不同的Linux发行版上无缝运行。快照包包含了所有必要的依赖项,用户无需担心软件兼容性问题;快照包在安装和运行时受到严格的权限控制,降低了安全风险;快照包在不同版本的Ubuntu以及其他支持Snap的Linux发行版上保持相同的运行环境。
将此时的虚拟机进行快照操作,保存为原始干净的虚拟机

二、编译内核源码
2.1 下载源码
Linux内核官网:The Linux Kernel Archives
现在最新的稳定的内核版本是Linux6.13.6(Linux 内核的版本号分成三部分,第一个数
字表示主版本号,第二个数字表示次版本号,第三个数字表示修正版本号)

下载好之后,把它拖到虚拟机的文件夹下,并进行解压缩
tar xvf linux-6.13.6.tar.xz2.2 指定编译工具
![]()
2.3 将根文件系统放到源码根目录
sudo cp ~/linux/rootfs rootfs_arm64 -a![]()
2.4 配置生成.config
输入以下命令
make defconfig
make menuconfig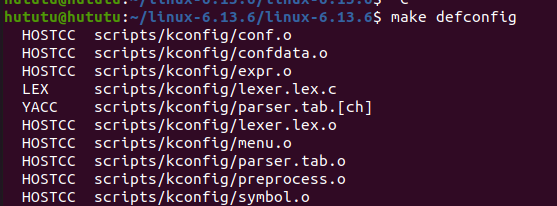

添加hotplug支持
Device Drivers -> Generic Driver Options -> Support for uevent helper (/sbin/hotplug) path to uevent helper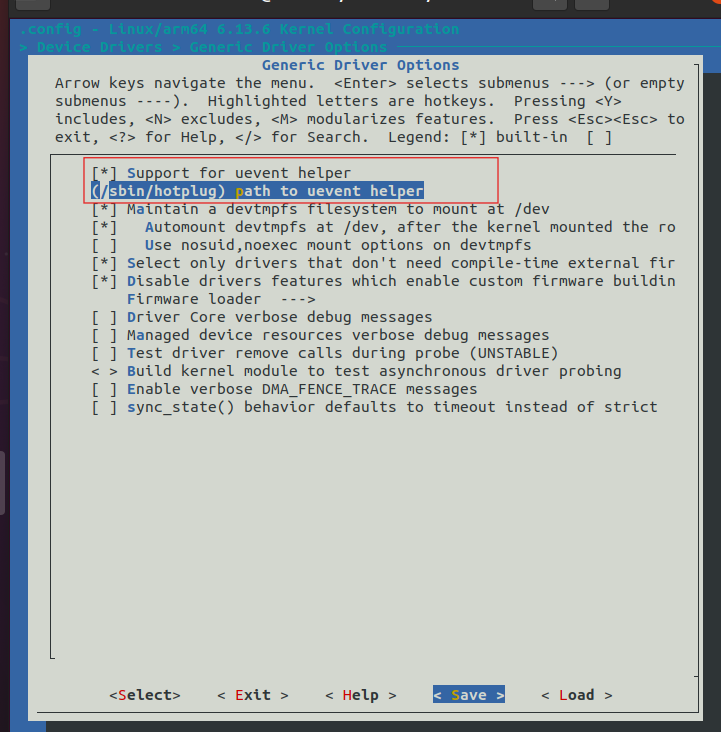
添加initramfs支持
[*]Initial RAM filesystem and RAM disk(initramfs/initrd) support(_install_arm64) Initramfs souce file(s)
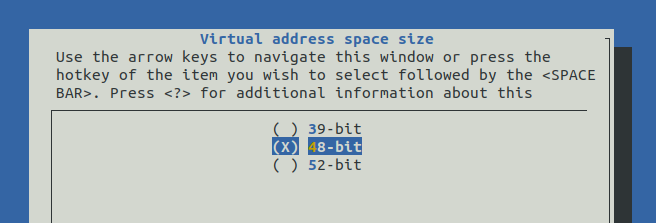
Virtual address space配置
Kernel Features ---> Page size(4KB) --->Virtual address space size(48-bit)--->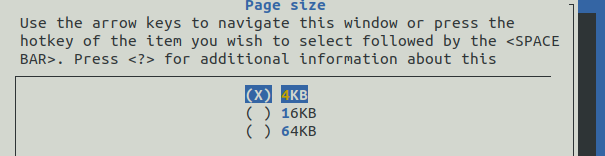
2.5 编译
make all -j8三、安装aarch64交叉编译工具
下载安装对应架构的交叉编译工具链(arm64架构),搭建QEMU的模拟环境
sudo apt-get install gcc-aarch64-linux-gnu
sudo apt-get install libncurses5-dev build-essential git bison flex libssl-dev![]()
![]()
安装完成,查看版本说明
aarch64-linux-gnu-gcc -v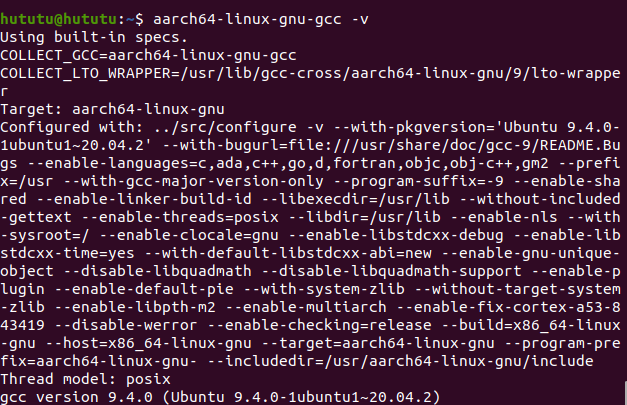
四、安装QEMU
QEMU是一个通用的开源机器模拟器和虚拟化器,它可以模拟整个系统,也可以作为虚拟化的宿主程序。使用QEMU可以方便地在不同硬件平台上运行Linux系统。
输入以下命令进行安装
sudo apt install qemu-system-arm
安装完成,输入以下命令查看版本
qemu-system-aarch64 --version
五、创建基于 Ubuntu Linux 的根文件系统
根文件系统是Linux操作系统中最重要的组成部分,它包含了系统启动和运行所需的最基本的文件和目录。创建根文件系统是定制Linux系统的关键步骤。
5.1 BusyBox构建根系文件系统
5.1.1 下载BusyBox源码
将下载的压缩包保存到Ubuntu虚拟机中的文件夹,并对其进行解压
![]()
加压后的文件如下所示:
5.1.2 制定编译工具链
输入以下命令
cd busybox-1.36.1
export ARCH=arm64
export CROSS_COMPILE=aarch64-linux-gnu-
//检测是否配置成功
echo $ ARCH
echo $CROSS_COMPILE
5.1.3 配置编译BusyBox
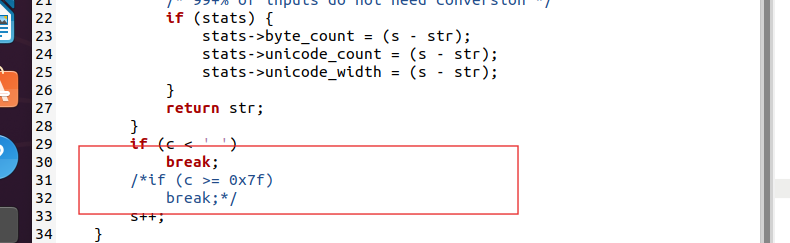
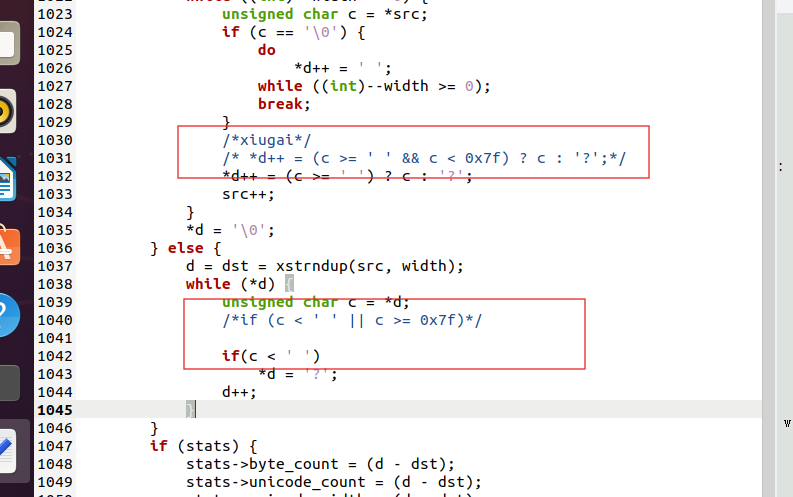
busybox中文字符支持:若直接编译busybox,使用串口工具时是不支持中文显示的,会显示为“?” ,修改源码,取消 busybox对中文显示的限制
修改内容如下:
/libbb/printable_string.c,将函数printable_string()中的部分程序注释掉,修改后的函数内容如下:
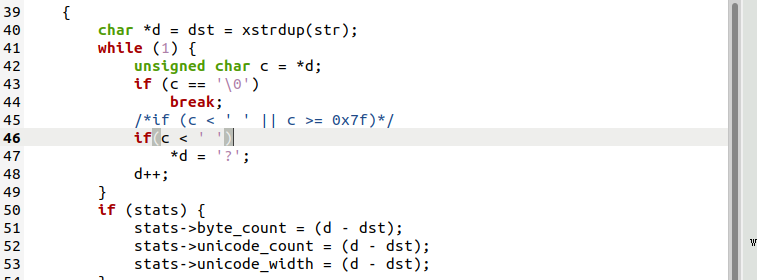
接着打开文件/libbb/unicode.c,修改如下内容:
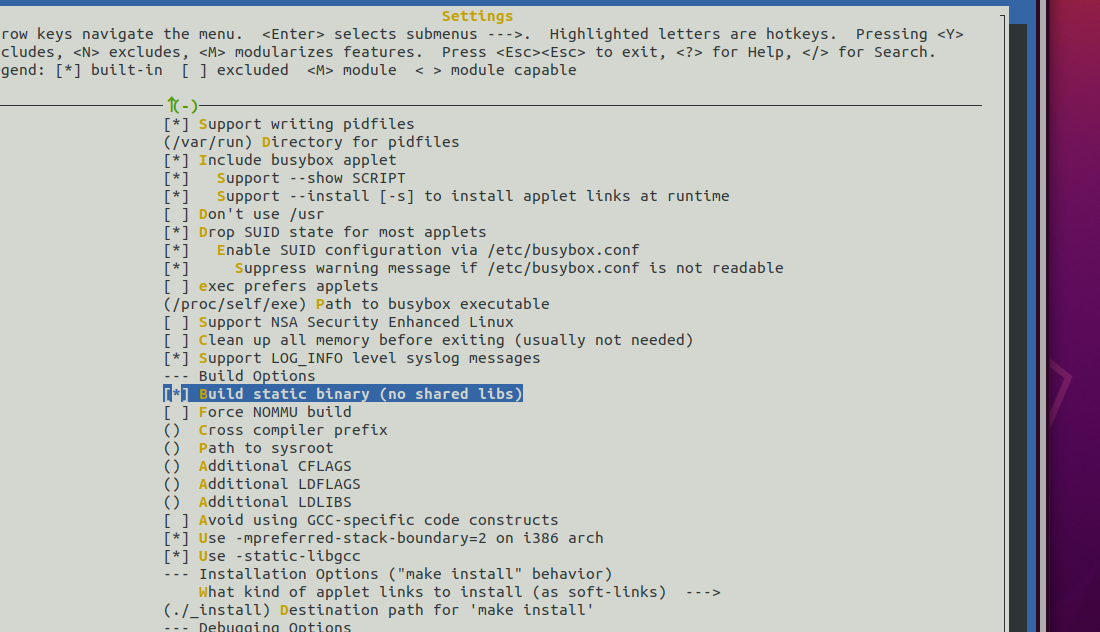
配置busybox
配置好之后编译BusyBox,输入以下命令
make
make install CONFIG_PREFIX=/home/hututu/linux/rootfs
#CONFIG_PREFIX指定编译结果的存放目录执行make install CONFIG_PREFIX=/home/hututu/linux/rootfs会报错mkdir: cannot create directory '/home/linux': Permission denied make: *** [/home/hututu/linux/busybox-1.37.0/Makefile.custom:39:install] 错误 1,此时,我们先执行以下命令:
sudo cp ~/linux/rootfs rootfs_arm64 -a之后再输入以下命令:
make install CONFIG_PREFIX=/home/hututu/linux/rootfs执行成功,显示如下:
编译完成,BusyBox的所有工具和文件都安装到了roofts目录下,如下图所示:

5.1.4 创建需要的目录
![]()
(1)etc目录更新
分别创建以下几个文件夹
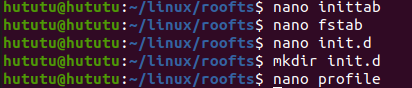
创建profile文件,添加以下内容
#!/bin/sh
export HOSTNAME=user
export USER=root
export HOME=/home
export PS1="[$USER@$HOSTNAME \W]\# "
PATH=/bin:/sbin:/usr/bin:/usr/sbin
LD_LIBRARY_PATH=/lib:/usr/lib:$LD_LIBRARY_PATH
export PATH LD_LIBRARY_PATH创建inittab 文件,添加下面内容
::sysinit:/etc/init.d/rcS
::respawn:-/bin/sh
::askfirst:-/bin/sh
::ctrlaltdel:/bin/umount -a -r创建fstab文件,添加以下内容
#device mount-point type options dump fsck order
proc /proc proc defaults 0 0
tmpfs /tmp tmpfs defaults 0 0
sysfs /sys sysfs defaults 0 0
tmpfs /dev tmpfs defaults 0 0
debugfs /sys/kernel/debug debugfs defaults 0 0
kmod_mount /mnt 9p trans=virtio 0 0用以下命令创建init.d目录
mkdir init.d在init.d目录下创建rcS文件,添加以下内容
cd init.dmkdir -p /sys
mkdir -p /tmp
mkdir -p /proc
mkdir -p /mnt
/bin/mount -a
mkdir -p /dev/pts
mount -t devpts devpts /dev/pts
echo /sbin/mdev > /proc/sys/kernel/hotplug
mdev -s用以下命令为rcS添加权限
chmod 777 rcS![]()
最后输入tree命令查看etc下的目录结构:
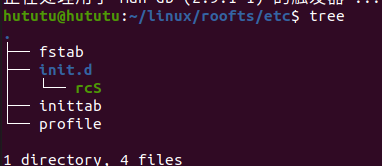
如果输入tree命令,提示如下:
ommand 'tree' not found, but can be installed with:
sudo snap install tree # version 2.1.3+pkg-5852, or
sudo apt install tree # version 1.8.0-1
See 'snap info tree' for additional versions.说明没有安装tree命令,只需要输入如下命令进行安装即可
sudo apt update
sudo apt install tree(2)dev目录下的必要文件
在主文件夹-->linux-->roofts文件夹下新建一个文件夹,命名为dev,导航到该文件夹,并输入以下命令:
sudo mknod console c 5 1![]()
输出以下命令来检查是否创建了cinsole的设备文件
ls -l /dev/console![]()
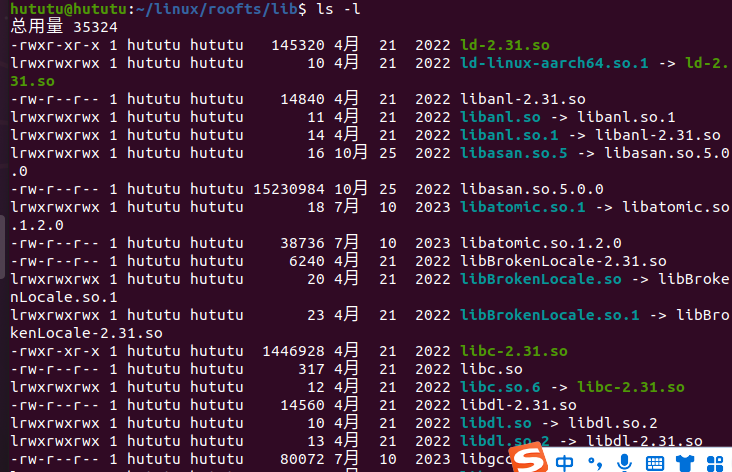
(3)lib目录下的必要文件
导航到lib文件夹,输入以下命令
cp /usr/aarch64-linux-gnu/lib/*.so* -a .检查当前文件夹是否包含了.so文件
六、启动QEMU
6.1 创建共享文件目录
输入以下命令,在内核源码目录下创建目录
mkdir kmodules![]()
6.2 运行QEMU模拟器
在内核源码目录下输入以下命令
qemu-system-aarch64 -machine virt -cpu cortex-a57 -machine type=virt -m 1024 -smp 4 -kernel arch/arm64/boot/Image --append "rdinit=/linuxrc root=/dev/vda rw console=ttyAMA0 loglevel=8" -nographic --fsdev local,id=kmod_dev,path=$PWD/kmodules,security_model=none -device virtio-9p-device,fsdev=kmod_dev,mount_tag=kmod_mount启动成功后的内容如下,Enter进入控制台
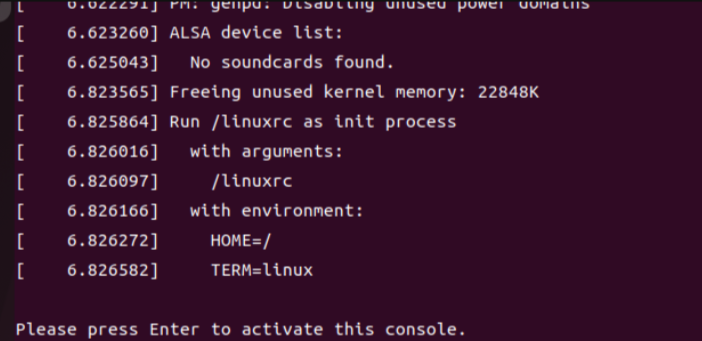

退出QEMU模拟器,输入以下命令
poweroff6.3 编译一个简单的内核模块并在QEMU上运行
在根目录下创建一个文件夹,并编写一个简单的代码
// 包含内核模块编程所需的头文件
#include <linux/init.h> // 包含模块初始化和退出函数的宏
#include <linux/module.h> // 包含模块相关的宏和函数
#include <linux/kernel.h> // 包含内核打印函数 printk 的头文件
static int __init test_init(void)
{// 在内核日志中打印 "hello world!"printk("hello world!\n");// 返回 0 表示初始化成功return 0;
}
static void __exit test_exit(void)
{// 在内核日志中打印 "hello exit!"printk("hello exit!\n");
}
// 当模块被加载时,test_init 函数会被调用
module_init(test_init);
// 当模块被卸载时,test_exit 函数会被调用
module_exit(test_exit);
// GPL 是 GNU 通用公共许可证,表示这是一个开源模块
MODULE_LICENSE("GPL");
再编写Makefile文件# 设置目标架构为 ARM64
export ARCH=arm64
# 设置交叉编译工具链前缀为 aarch64-linux-gnu-
export CROSS_COMPILE=aarch64-linux-gnu-
# 定义内核源码目录
KERNEL_DIR ?= /home/xlq/linux-6.13.5
# 定义要编译的内核模块目标文件
# obj-m 表示将 hello.c 编译为内核模块 hello.ko
obj-m := hello.o
# 默认目标:编译内核模块
modules:# 调用内核源码目录的 Makefile,编译当前目录下的模块$(MAKE) -C $(KERNEL_DIR) M=$(PWD) modules
# 清理目标:删除编译生成的文件
clean:# 调用内核源码目录的 Makefile,清理当前目录下的生成文件$(MAKE) -C $(KERNEL_DIR) M=$(PWD) clean
# 安装目标:将编译好的内核模块复制到指定目录
install:# 将当前目录下所有的 .ko 文件复制到内核源码目录的 kmodules 子目录中cp *.ko $(KERNEL_DIR)/kmodules编译module,输入以下命令拷贝到共享目录
make modules
make install 输入以下命令启动QEMU
qemu-system-aarch64 -machine virt -cpu cortex-a57 -machine type=virt -m 1024 -smp 4 -kernel arch/arm64/boot/Image --append "rdinit=/linuxrc root=/dev/vda rw console=ttyAMA0 loglevel=8" -nographic --fsdev local,id=kmod_dev,path=$PWD/kmodules,security_model=none -device virtio-9p-device,fsdev=kmod_dev,mount_tag=kmod_mountls /mnt
可以看到.ko文件
在QEUM执行module的插入与卸载,可以看到成功执行并打印log
[hututu@hututu ]$ cd mnt
[hututu@hututu mnt]$ ls /mnt
hello.ko kmod_mount
[hututu@hututu mnt]$ insmod hello.ko
[ 3679.306752] hello: loading out-of-tree module taints kerne
[ 3679.322242] hello world!
[hututu@hututu mnt]$ rmmod hello.ko
3732.515746] hello exit!

七、总结
通过本次实验,了解了Linux系统的基本安装和配置方法,还对虚拟化技术、软件源管理、根文件系统构建以及跨平台编译等高级概念有了深入的理解。这些知识和技能对于进一步学习Linux系统管理和软件开发具有重要意义。
参考博客:Ubuntu虚拟机中使用QEMU搭建ARM64环境-CSDN博客