CANopen Read SDO.vi 和 CANopen Read Write CAN Frame.vi 都是 NI-Industrial Communications for CANopen 库中的示例 VI,用于与 CANopen 网络进行通信,但它们的功能和使用场景有所不同。以下是它们的主要区别:
1. 功能层次
-
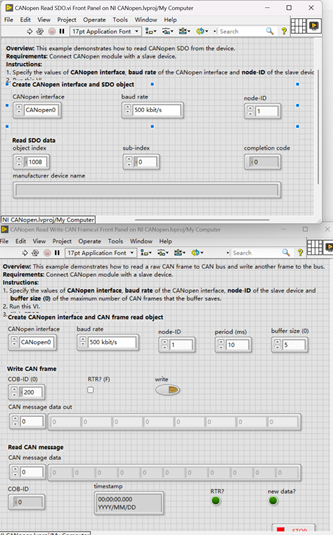
CANopen Read Write CAN Frame.vi:
-
这个 VI 直接操作 CAN 帧,是在 CANopen 通信中进行底层操作的工具。它允许用户直接读写原始 CAN 帧,并且与 CANopen 协议的具体实现无关。这意味着用户可以发送或接收任何 CAN 帧,而不考虑帧的具体含义或 CANopen 协议的结构。
-
-
CANopen Read SDO.vi:
-
这个 VI 专门用于读取 CANopen SDO(Service Data Object)。SDO 是 CANopen 协议中用于传输对象字典中数据的服务,用于配置、参数传输和诊断等功能。
CANopen Read SDO.vi通过发送 SDO 请求并解析从设备返回的响应来读取指定对象字典条目的数据。
-
2. 使用场景
-
CANopen Read Write CAN Frame.vi:
-
适用于需要直接控制和监控 CAN 帧的场景,比如在开发和调试 CANopen 网络时使用。这种低层次的操作更灵活,但也更复杂,因为用户需要自己处理 CANopen 协议的具体实现细节。
-
-
CANopen Read SDO.vi:
-
适用于需要读取 CANopen 网络中某个节点的参数或配置的场景。这个 VI 简化了操作,用户只需要提供 SDO 的索引和子索引,VI 会自动处理请求的构建、发送和响应的解析。这对于想要利用 CANopen 高层协议功能的用户来说非常方便。
-
3. 协议处理
-
CANopen Read Write CAN Frame.vi:
-
不处理 CANopen 协议的高层次细节,只是发送和接收原始 CAN 帧。用户需要自己构建符合 CANopen 协议的帧。
-
-
CANopen Read SDO.vi:
-
自动处理 CANopen 协议的 SDO 请求和响应,包括帧的构建和解析。这减轻了用户的负担,用户只需指定要读取的数据对象即可。
-
4. 复杂性
-
CANopen Read Write CAN Frame.vi:
-
复杂性较高,适合高级用户或需要定制化 CANopen 通信的场景。
-
-
CANopen Read SDO.vi:
-
相对简单,适合希望快速实现 CANopen 网络节点配置和数据读取的用户。
-
总结
-
CANopen Read Write CAN Frame.vi 是一个低层次的工具,用于直接读写 CAN 帧,适合那些需要精细控制或调试 CANopen 通信的用户。
-
CANopen Read SDO.vi 是一个高层次的工具,专门用于 CANopen 协议中的 SDO 通信,简化了对象字典数据的读取过程,适合那些希望利用 CANopen 协议提供的标准化服务的用户。
根据你的具体需求,你可以选择适合的 VI 来实现相应的功能。如果需要与 CANopen 设备进行配置或参数传输,CANopen Read SDO.vi 是更合适的选择;如果需要更底层的帧控制和调试功能,则 CANopen Read Write CAN Frame.vi 更为合适。