前言:
本文是根据哔哩哔哩网站上“正点原子[第二期]Linux之ARM(MX6U)裸机篇”视频的学习笔记,在这里会记录下正点原子 I.MX6ULL 开发板的配套视频教程所作的实验和学习笔记内容。本文大量引用了正点原子教学视频和链接中的内容。
引用:
正点原子IMX6U仓库 (GuangzhouXingyi) - Gitee.com
《【正点原子】I.MX6U嵌入式Linux驱动开发指南V1.5.2.pdf》
正点原子资料下载中心 — 正点原子资料下载中心 1.0.0 文档
SPI学习参考资料:
简述SPI通信协议-01_cpha选择为第一个边沿-CSDN博客
SPI中的CPHA,CPOL详解-CSDN博客
一文搞懂SPI通信协议_spi协议-CSDN博客
摩托罗拉 《SPI Block Guide V03.06》 手册
链接:https://pan.baidu.com/s/1_mvR5AD0-OBI2bYyx2i4Sw?pwd=f4bo
提取码:f4bo
正文:
本文是 “正点原子[第二期]Linux之ARM(MX6U)裸机篇--第24讲 SPI驱动。本节将参考正点原子的视频教程第24讲和配套的正点原子开发指南文档进行学习。
0. 概述
通I2C一样,SPI是很常用的通信接口,也可以通过SPI来连接众多的传感器。相比I2C接口,SPI接口的通信速度很快,I2C最多400KHz,但是SPI可以到达即使MHz。I.MX6U 也有4个SPI接口,可以通过这4个SPI接口来连接一些SPI外设。I.MX6U-ALHPA使用SPI3接口连接了一个6周传感器 ICM-20608,本章我们就来学习如何使用I.MX6U的SPI接口来驱动ICM-20608,读取ICM-20608的六轴数据。
1. I.MX6U 的SPI接口
I.MX6U 处理器的SPI接口在《I.MX6ULL参考手册》的第20章 "Chapter 20Enhanced Configurable SPI (ECSPI)"章节,

I.MX6U ECSPI 接口的硬件框图如下:
- ECSPI有64个32位的TXFIFO 缓冲区
- ECSPI有64个32位的RXFIFO 缓冲区
- 通过ECSPI 硬件接口的 FIFOx 缓冲区可以减少数据传输时的中断数量从而提高传输速率

I.MX6U ECSPI 硬件接口的特向如下:
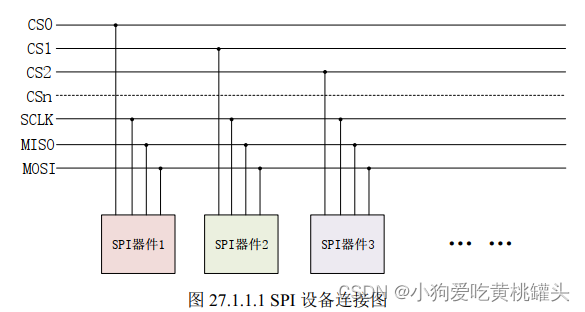
- 全双工,同步,串行接口
- 主机/从机模式
- 4个CS(Chip Seclect)片选信号线来支持多个外部设备
- 持续传输模式允许任意长度的数据传输
- Tx和Rx方向分别有32位的 64 条目的FOFO缓冲器
- 时钟极性(Polarity),时钟相位(Phase)和时钟频率可以配置
- DMA支持
- 最大运行频率可以达到参考时钟频率
2. I.MX6U ECSPI 时钟
从I.MX6U的时钟树(Clock Tree)可以找到 ECSPI 接口的时钟来源于 PLL3_480MHz,并且经过一个固定值为8的分频,所以从时钟树CCM进入到到 ESPAI 接口的时钟频率为
ESAPI = PLL3_480Mhz/8 = 60MHz


在ECSAPI时钟树可以看到,ECSAPI的时钟源选择还需要配置一个多路选择器 CCM_CSCDR2 [ECSPI_CLK_SEL] 和一个分频器 CCM_CSCDR2[ECSPI_CLK_PODF] 。
这个CCM_CSCDR2 寄存器的结构如下图所示:
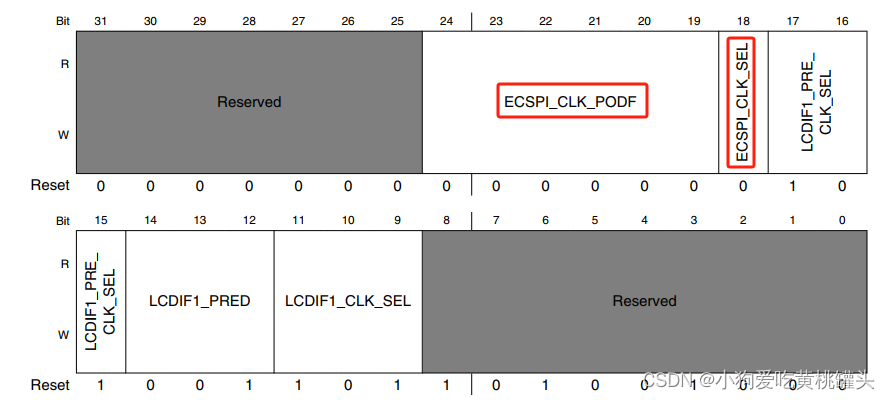


这里配置为1分频,时钟源选择为PLL3_60M
CCM_CSCDR2寄存器的 bit[24:19] 设置为0表示1分频,bit[18]=0 表示时钟源选择 PLL3_60M
3. I.MX6U ECSPI 寄存器
I.MX6U ECSPI 寄存器主要有如下这些寄存器。

本节实验中正点原子的示例教程里不使用SPI的DMA和中断,所以我们需要的寄存器有:
- ECSPIx_RXDATA:Tx要发送数据
- ECSPIx_TXDATA:Rx接收到的数据
- ECSPIx_CONREG:控制寄存器
- ECSPIx_CONFIGREG:控制寄存器
- ECSSPIx_STATREG:状态寄存器
3.1 ECSPIx_RXDATA寄存器

ECSPIx_RXDATA 是32位的 Rx 接收数据寄存器,在读取Rx数据之前需要先检查 RR (Read Ready)标志位是否为1.
3.2 ECSPIx_TXDATA寄存器

ECSPIx_TXDATA 是32位的 Tx 发送数据寄存器,写到TxDATA寄存器的数据被存放到ECSPI的TX FIFO中,如果TXFIFO不满软件就可以向这个寄存器写值。
3.3 ECSPIx_CONREG 寄存器

ECSPI_CONREG 寄存器允许软件来使能/复位 ECSPI接口,设置时钟分频值,设置传输长度(Bust-Length)。我们需要使用的位如下:
- EN bit[0]:为1使能ECSPI接口,为0去使能接口并对ECSPI进行复位。
- HT bit[1]: 硬件翻转,手册说I.MX6ULL不支持该功能
- XCH bit[2]:指示空闲或者Busy,本实验设置该位值为0。
- SMC bit[3]:传输开始模式,值为1的时候需要SPI_RDY信号来控制传输开始,值为0时TXFIFO中写数据立即传输开始,本实验设置该位为0。
- CHANNEL_MODE bit[7:4]:一个ECSPI接口支持4个通道(Channel),这里是选择4个通道的工作模式为主机模式(Master)还是从机模式(Slave),本实验使用 Channel 0,所以该位设置为0x1.
- POST_DIVDER bit[11:8]:后级分频,值范围为0~15对应2的(0~15)次方分频。
- PRE_DIVIDER bit[15:12]:前级分频,值范围为0~15对应1~16分频。
- DRCTL bit[17:16]:本实验不使用
- BUSRT_LENGTH bit[31:20]:每次突发传输长度,值范围为0~0XFFF,对应1到0x1000 bit 位,本实验设置每次突发传输长度为8位,所以设置值为7。
3.4 ECSPI_CONFIGREG寄存器

ECSPIx_CONFIGREG 寄存器允许软件来配置SPI通道的运行模式,串行时钟的极性(CPOL: Clock Polarity),串行时钟的相位(Clock Phase),数据发送波形模式(SPI Wave From)。本实验中用到的寄存器如下:
- SCLK_PHA bit[3:0]:ECSPI接口支持4个通道(channel) ,通道0~3,配置通道0~3的 CPHA 时钟相位。
- SCLK_POL bit[3:0]:ECSPI接口支持4个通道(channel) ,通道0~3,配置通道0~3的 CPOL时钟极性。
- SS_CTL bit[11:8]:SPI Wave From 波形模式,配置SPI发送数据时 single bust 单突发模式,还是Multi bust 多突发模式,单突发模式每次发送数据之后等待用户再次写入数据,多突发模式会发送一个burst之后自动拉高拉低SS线并再次发送TXFIFO中的下一个数据知道TXFIFO为空。本实验选择多突发模式。
- DATA_CTL(bit19:16):设置 DATA 信号线空闲状态电平, DATA_CTL[3:0]分别对应通道3~0,为 0 的话 DATA 空闲状态为高电平,为 1 的话 DATA 空闲状态为低电平。
- SCLK_CTL bit[23:20]:设置 SCLK 信号线空闲状态电平, SCLK_CTL[3:0]分别对应通道3~0,为 0 的话 SCLK 空闲状态为低电平,为 1 的话 SCLK 空闲状态为高电平
3.5 ECSPIx_STATREG
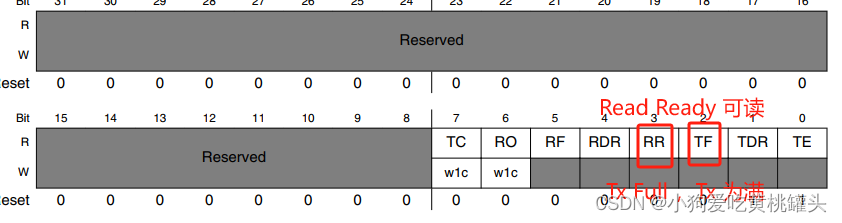
ECSPIx_STATREG 状态寄存器指示ECSPI接口的 TxFIFO和 RXFIFO的状态,本实验我们需要使用的是:
- TC(bit7):传输完成标志位,为 0 表示正在传输,为 1 表示传输完成。
- RO(bit6): RXFIFO 溢出标志位,为 0 表示 RXFIFO 无溢出,为 1 表示 RXFIFO 溢出。
- RF(bit5): RXFIFO 空标志位,为 0 表示 RXFIFO 不为空,为 1 表示 RXFIFO 为空。
- RDR(bit4): RXFIFO 数据请求标志位,此位为 0 表示 RXFIFO 里面的数据不大于
- RX_THRESHOLD,此位为 1 的话表示 RXFIFO 里面的数据大于 RX_THRESHOLD。
- RR(bit3): RXFIFO 就绪标志位,为 0 的话 RXFIFO 没有数据,为 1 的话表示 RXFIFO 中至少有一个字的数据。
- TF(bit2): TXFIFO 满标志位,为 0 的话表示 TXFIFO 不为满,为 1 的话表示 TXFIFO 为满。
- TDR(bit1): TXFIFO 数据请求标志位,为 0 表示 TXFIFO 中的数据大于 TX_THRESHOLD,为 1 表示 TXFIFO 中的数据不大于 TX_THRESHOLD
- TE(bit0): TXFIFO 空标志位,为 0 表示 TXFIFO 中至少有一个字的数据,为 1 表示 TXFIFO为空。
3.6 ECSPI_PERIODREG


寄存器 ECSPIx_PERIODREG,这个是 ECSPI 的采样周期寄存器。寄存器 ECSPIx_PERIODREG 用到的重要位如下:
- CSD_CTL(bit21:16): 片选信号延时控制位,用于设置片选信号和第一个 SPI 时钟信号之间的时间间隔,范围为 0~63。
- CSRC(bit15): SPI 时钟源选择,为 0 的话选择 SPI CLK 为 SPI 的时钟源,为 1 的话选择32.768KHz 的晶振为 SPI 时钟源
关于 ECSPI 的寄存器就介绍到这里,关于这些寄存器详细的描述,请参考《I.MX6ULL 参
考手册》第 805 页的 20.7 小节。
4. ICM-20608 6轴传感器
ICM-20608 是 InnvenSence 出品的一款6轴 MEMS传感器,包括3轴加速度和3周陀螺仪。ICM20608 的尺寸非常小,只有3X3X0.57ms,采用16P的LGA封装。