《博主简介》
小伙伴们好,我是阿旭。专注于人工智能、AIGC、python、计算机视觉相关分享研究。
✌更多学习资源,可关注公-仲-hao:【阿旭算法与机器学习】,共同学习交流~
👍感谢小伙伴们点赞、关注!
《------往期经典推荐------》
一、AI应用软件开发实战专栏【链接】
| 项目名称 | 项目名称 |
|---|---|
| 1.【人脸识别与管理系统开发】 | 2.【车牌识别与自动收费管理系统开发】 |
| 3.【手势识别系统开发】 | 4.【人脸面部活体检测系统开发】 |
| 5.【图片风格快速迁移软件开发】 | 6.【人脸表表情识别系统】 |
| 7.【YOLOv8多目标识别与自动标注软件开发】 | 8.【基于YOLOv8深度学习的行人跌倒检测系统】 |
| 9.【基于YOLOv8深度学习的PCB板缺陷检测系统】 | 10.【基于YOLOv8深度学习的生活垃圾分类目标检测系统】 |
| 11.【基于YOLOv8深度学习的安全帽目标检测系统】 | 12.【基于YOLOv8深度学习的120种犬类检测与识别系统】 |
| 13.【基于YOLOv8深度学习的路面坑洞检测系统】 | 14.【基于YOLOv8深度学习的火焰烟雾检测系统】 |
| 15.【基于YOLOv8深度学习的钢材表面缺陷检测系统】 | 16.【基于YOLOv8深度学习的舰船目标分类检测系统】 |
| 17.【基于YOLOv8深度学习的西红柿成熟度检测系统】 | 18.【基于YOLOv8深度学习的血细胞检测与计数系统】 |
| 19.【基于YOLOv8深度学习的吸烟/抽烟行为检测系统】 | 20.【基于YOLOv8深度学习的水稻害虫检测与识别系统】 |
| 21.【基于YOLOv8深度学习的高精度车辆行人检测与计数系统】 | 22.【基于YOLOv8深度学习的路面标志线检测与识别系统】 |
| 23.【基于YOLOv8深度学习的智能小麦害虫检测识别系统】 | 24.【基于YOLOv8深度学习的智能玉米害虫检测识别系统】 |
| 25.【基于YOLOv8深度学习的200种鸟类智能检测与识别系统】 | 26.【基于YOLOv8深度学习的45种交通标志智能检测与识别系统】 |
| 27.【基于YOLOv8深度学习的人脸面部表情识别系统】 | 28.【基于YOLOv8深度学习的苹果叶片病害智能诊断系统】 |
| 29.【基于YOLOv8深度学习的智能肺炎诊断系统】 | 30.【基于YOLOv8深度学习的葡萄簇目标检测系统】 |
| 31.【基于YOLOv8深度学习的100种中草药智能识别系统】 | 32.【基于YOLOv8深度学习的102种花卉智能识别系统】 |
| 33.【基于YOLOv8深度学习的100种蝴蝶智能识别系统】 | 34.【基于YOLOv8深度学习的水稻叶片病害智能诊断系统】 |
| 35.【基于YOLOv8与ByteTrack的车辆行人多目标检测与追踪系统】 | 36.【基于YOLOv8深度学习的智能草莓病害检测与分割系统】 |
| 37.【基于YOLOv8深度学习的复杂场景下船舶目标检测系统】 | 38.【基于YOLOv8深度学习的农作物幼苗与杂草检测系统】 |
| 39.【基于YOLOv8深度学习的智能道路裂缝检测与分析系统】 | 40.【基于YOLOv8深度学习的葡萄病害智能诊断与防治系统】 |
| 41.【基于YOLOv8深度学习的遥感地理空间物体检测系统】 | 42.【基于YOLOv8深度学习的无人机视角地面物体检测系统】 |
| 43.【基于YOLOv8深度学习的木薯病害智能诊断与防治系统】 | 44.【基于YOLOv8深度学习的野外火焰烟雾检测系统】 |
| 45.【基于YOLOv8深度学习的脑肿瘤智能检测系统】 | 46.【基于YOLOv8深度学习的玉米叶片病害智能诊断与防治系统】 |
| 47.【基于YOLOv8深度学习的橙子病害智能诊断与防治系统】 | 48.【基于深度学习的车辆检测追踪与流量计数系统】 |
| 49.【基于深度学习的行人检测追踪与双向流量计数系统】 | 50.【基于深度学习的反光衣检测与预警系统】 |
| 51.【基于深度学习的危险区域人员闯入检测与报警系统】 | 52.【基于深度学习的高密度人脸智能检测与统计系统】 |
| 53.【基于深度学习的CT扫描图像肾结石智能检测系统】 | 54.【基于深度学习的水果智能检测系统】 |
| 55.【基于深度学习的水果质量好坏智能检测系统】 | 56.【基于深度学习的蔬菜目标检测与识别系统】 |
| 57.【基于深度学习的非机动车驾驶员头盔检测系统】 | 58.【基于深度学习的太阳能电池板检测与分析系统】 |
| 59.【基于深度学习的工业螺栓螺母检测】 | 60.【基于深度学习的金属焊缝缺陷检测系统】 |
| 61.【基于深度学习的链条缺陷检测与识别系统】 | 62.【基于深度学习的交通信号灯检测识别】 |
| 63.【基于深度学习的草莓成熟度检测与识别系统】 | 64.【基于深度学习的水下海生物检测识别系统】 |
| 65.【基于深度学习的道路交通事故检测识别系统】 |
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
五、YOLOv8改进专栏【链接】,持续更新中~~
六、YOLO性能对比专栏【链接】,持续更新中~
《------正文------》
目录
- 步骤1:导入所需的库
- 步骤2:定义卷积神经网络架构
- 卷积层
- 池化层
- 步骤3:硬件设置
- 步骤4:定义超参数
- 第5步:加载数据
- 步骤6:初始化网络
- 步骤7:定义损失和优化器
- 步骤8:训练网络
- 步骤9:模型评估
- 结论
本文将分布详细介绍,如何使用PyTorch构建和训练一个简单的卷积神经网络(CNN),非常适合新手练手。我们将使用MNIST数据集(手写体数字数据集)来训练我们的模型。本指南假设你有一些Python和神经网络的基础知识,但不需要有PyTorch的经验。
步骤1:导入所需的库
首先,我们需要导入必要的库。PyTorch是我们用于构建和训练神经网络的主要库。我们还将使用torchvision来处理数据集和转换。
import torch
import torch.nn.functional as F
import torchvision.datasets as datasets
import torchvision.transforms as transforms
from torch import optim
from torch import nn
from torch.utils.data import DataLoader
from tqdm import tqdm
步骤2:定义卷积神经网络架构
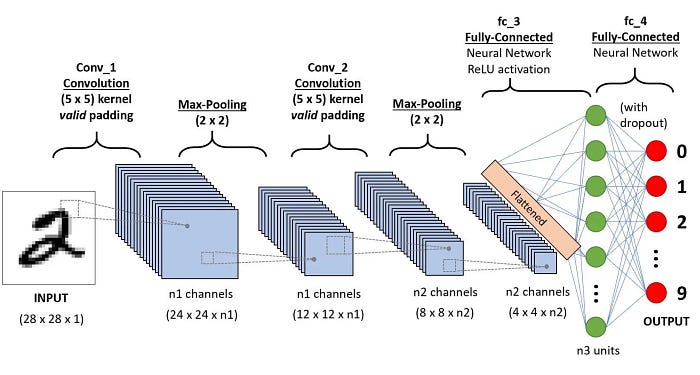
我们将创建一个简单的CNN,它有两个卷积层,后面是一个完全连接的层。CNN特别适合图像数据,因为它们会自动捕获图像中的空间层次结构,例如边缘,纹理和更复杂的模式。
卷积层
卷积层是CNN的构建块。它们由几个关键组成部分组成:
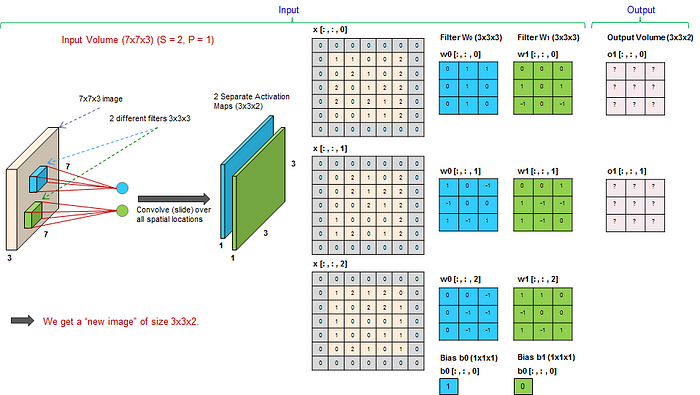
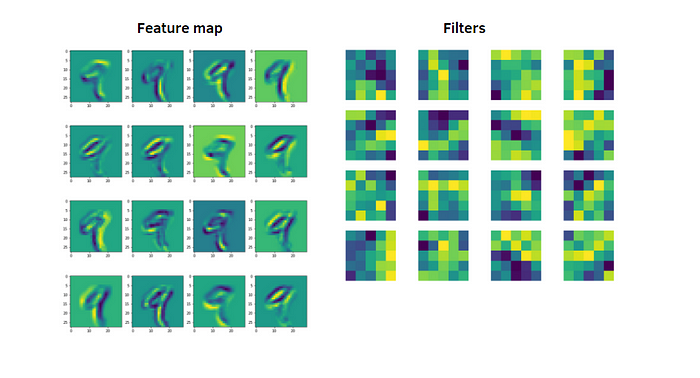
过滤器(内核)-kernal:
- 滤波器是在输入图像上滑动并执行逐元素乘法然后求和的小矩阵。每个滤波器被设计为检测输入图像中的特定特征。
- 例如,过滤器可以检测水平边缘、垂直边缘或更复杂的纹理。
- 将滤波器应用于输入图像的输出称为特征图或激活图。如果你有多个过滤器,你会得到多个特征图。
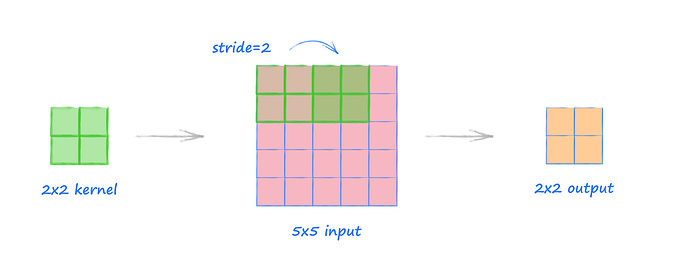
步幅-stride:
- 步幅是滤波器在输入图像上移动的步长。
- 步幅为1意味着过滤器一次移动一个像素,包括水平和垂直方向。
- 较大的步幅会减小特征图的大小,因为过滤器会跳过更多的像素。例如,步幅为2意味着过滤器一次移动两个像素,有效地对特征图进行下采样。
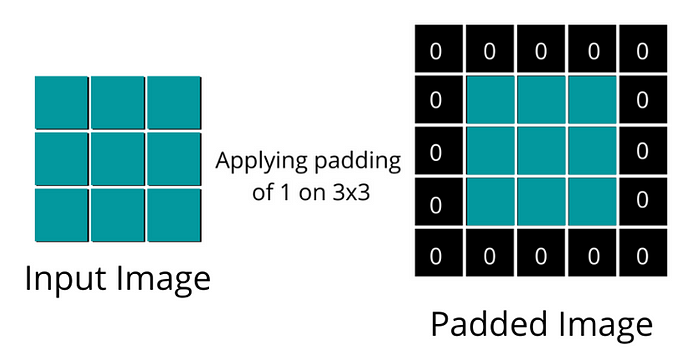
填充-padding:
- 填充涉及在输入图像的边界周围添加额外的像素。这些额外的像素通常设置为零(零填充)。
- 填充可确保滤镜正确地覆盖图像,尤其是在边缘处。如果没有填充,特征图的大小在每次卷积操作后都会减小。
- 例如,如果您有一个5x5的输入图像和一个没有填充的3x3过滤器,则生成的特征图将是3x3。当padding为1时,特征图保持与输入相同的大小。
特征图:
- 特征图是在对输入图像应用滤波器之后卷积层的输出。
- 每个特征映射对应于不同的过滤器,并从输入中捕获不同的特征。
- 将多个特征图堆叠在一起形成多通道输出,该输出用作下一层的输入。
池化层
池化层减少了特征图的空间维度,这有助于提高网络的计算效率并减少过拟合。有两种主要类型的池:
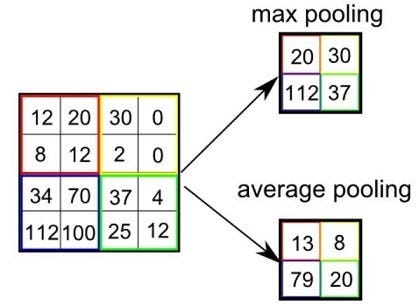
- 最大池化:
- 最大池化从特征图的每个补丁中获取最大值。
- 例如,在2x2最大池化操作中,取特征图的每个2x2块的最大值来创建新的较小特征图。
- 此操作会将特征图的大小在水平和垂直方向上减少一半,但保留最突出的特征。
- 平均合并:
- 平均池取特征图每个补丁的平均值。
- 类似于最大池,但不是最大值,而是每个块的平均值。
- 这在不同的上下文中可能很有用,尽管最大池在实践中更常见。
以下是我们如何定义我们的CNN:
class CNN(nn.Module):def __init__(self, in_channels, num_classes=10):"""Define the layers of the convolutional neural network.Parameters:in_channels: intThe number of channels in the input image. For MNIST, this is 1 (grayscale images).num_classes: intThe number of classes we want to predict, in our case 10 (digits 0 to 9)."""super(CNN, self).__init__()# First convolutional layer: 1 input channel, 8 output channels, 3x3 kernel, stride 1, padding 1self.conv1 = nn.Conv2d(in_channels=in_channels, out_channels=8, kernel_size=3, stride=1, padding=1)# Max pooling layer: 2x2 window, stride 2self.pool = nn.MaxPool2d(kernel_size=2, stride=2)# Second convolutional layer: 8 input channels, 16 output channels, 3x3 kernel, stride 1, padding 1self.conv2 = nn.Conv2d(in_channels=8, out_channels=16, kernel_size=3, stride=1, padding=1)# Fully connected layer: 16*7*7 input features (after two 2x2 poolings), 10 output features (num_classes)self.fc1 = nn.Linear(16 * 7 * 7, num_classes)def forward(self, x):"""Define the forward pass of the neural network.Parameters:x: torch.TensorThe input tensor.Returns:torch.TensorThe output tensor after passing through the network."""x = F.relu(self.conv1(x)) # Apply first convolution and ReLU activationx = self.pool(x) # Apply max poolingx = F.relu(self.conv2(x)) # Apply second convolution and ReLU activationx = self.pool(x) # Apply max poolingx = x.reshape(x.shape[0], -1) # Flatten the tensorx = self.fc1(x) # Apply fully connected layerreturn x
步骤3:硬件设置
PyTorch可以在CPU和GPU上运行。我们将设备设置为使用GPU(如果可用);否则,我们将使用CPU。
device = "cuda" if torch.cuda.is_available() else "cpu"
步骤4:定义超参数
超参数是用于调整模型训练方式的配置设置。
input_size = 784 # 28x28 pixels (not directly used in CNN)
num_classes = 10 # digits 0-9
learning_rate = 0.001
batch_size = 64
num_epochs = 10 # Reduced for demonstration purposes
第5步:加载数据
我们将使用torchvision.datasets模块下载并加载MNIST数据集。我们还将使用DataLoader来处理批处理和洗牌。
train_dataset = datasets.MNIST(root="dataset/", download=True, train=True, transform=transforms.ToTensor())
train_loader = DataLoader(dataset=train_dataset, batch_size=batch_size, shuffle=True)test_dataset = datasets.MNIST(root="dataset/", download=True, train=False, transform=transforms.ToTensor())
test_loader = DataLoader(dataset=test_dataset, batch_size=batch_size, shuffle=True)
步骤6:初始化网络
我们实例化我们的神经网络并将其移动到设备(GPU或CPU)。
model = CNN(in_channels=1, num_classes=num_classes).to(device)
步骤7:定义损失和优化器
我们将使用交叉熵损失进行分类,并使用Adam优化器更新模型的权重。
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=learning_rate)
步骤8:训练网络
我们将多次循环数据集(epoch),并根据损失更新模型的权重。
for epoch in range(num_epochs):print(f"Epoch [{epoch + 1}/{num_epochs}]")for batch_index, (data, targets) in enumerate(tqdm(train_loader)):# Move data and targets to the device (GPU/CPU)data = data.to(device)targets = targets.to(device)# Forward pass: compute the model outputscores = model(data)loss = criterion(scores, targets)# Backward pass: compute the gradientsoptimizer.zero_grad()loss.backward()# Optimization step: update the model parametersoptimizer.step()
步骤9:模型评估
我们将定义一个函数来检查模型在训练和测试数据集上的准确性。
def check_accuracy(loader, model):"""Checks the accuracy of the model on the given dataset loader.Parameters:loader: DataLoaderThe DataLoader for the dataset to check accuracy on.model: nn.ModuleThe neural network model."""if loader.dataset.train:print("Checking accuracy on training data")else:print("Checking accuracy on test data")num_correct = 0num_samples = 0model.eval() # Set the model to evaluation modewith torch.no_grad(): # Disable gradient calculationfor x, y in loader:x = x.to(device)y = y.to(device)# Forward pass: compute the model outputscores = model(x)_, predictions = scores.max(1) # Get the index of the max log-probabilitynum_correct += (predictions == y).sum() # Count correct predictionsnum_samples += predictions.size(0) # Count total samples# Calculate accuracyaccuracy = float(num_correct) / float(num_samples) * 100print(f"Got {num_correct}/{num_samples} with accuracy {accuracy:.2f}%")model.train() # Set the model back to training mode# Final accuracy check on training and test sets
check_accuracy(train_loader, model)
check_accuracy(test_loader, model)
结论
本文使用PyTorch构建、训练和评估了一个简单的卷积神经网络(CNN)。本指南涵盖了从定义模型架构到加载数据、训练模型和评估其性能的基本内容。CNN是图像识别任务的强大工具,PyTorch为开发它们提供了一个灵活而强大的框架。
关注文末名片G-Z-H:【阿旭算法与机器学习】,发送【开源】可获取更多学习资源
好了,这篇文章就介绍到这里,喜欢的小伙伴感谢给点个赞和关注,更多精彩内容持续更新~~
关于本篇文章大家有任何建议或意见,欢迎在评论区留言交流!