目录
《复现的项目来源》
一、创建虚拟环境
二、下载原项目并修改(非必须)
二、可直接下载修改后的项目
三、配置环境
(1)安装jupyterlab以及内核
(2)安装ffmpeg
(3)配置环境(重要)
四、运行项目
《复现的项目来源》
感谢大佬的开源,大佬的开源地址为:ZhangHangTao/Embodied-AI-simulators
克隆大佬的项目后,按照下面步骤可在自己本地成功复现。
一、创建虚拟环境
conda create -n Embodied_AI_simulators python=3.10
conda activate Embodied_AI_simulators二、下载原项目并修改(非必须)
git clone https://github.com/ZhangHangTao/Embodied-AI-simulators.git# Code_as_Policies_Interactive_Demo.ipynb文件的修改变动
第一处:
# 添加安装额外的包
!pip install opencv-python==4.11.0.86
!pip install requests==2.32.3
!pip install gdown==5.2.0
!pip install matplotlib第二处:
# from google.colab.patches import cv2_imshow
import os
os.environ["FFMPEG_BINARY"] = "/home/nq123/anaconda3/envs/Embodied_AI_simulators/bin/ffmpeg"
from moviepy.editor import ImageSequenceClip第三处:
client = OpenAI(api_key='sk-xxxx', base_url="xxx")第四处:在class LMP里替换更智能的模型
model='gpt-4-turbo'第五处:修改Interactive Tabletop Manipulation的代码
#@title Initialize Env { vertical-output: true }
# num_blocks = 3 #@param {type:"slider", min:0, max:4, step:1}
# num_bowls = 3 #@param {type:"slider", min:0, max:4, step:1}
# high_resolution = False #@param {type:"boolean"}
# high_frame_rate = False #@param {type:"boolean"}# # setup env and LMP
# env = PickPlaceEnv(render=True, high_res=high_resolution, high_frame_rate=high_frame_rate)
# block_list = np.random.choice(ALL_BLOCKS, size=num_blocks, replace=False).tolist()
# bowl_list = np.random.choice(ALL_BOWLS, size=num_bowls, replace=False).tolist()
# obj_list = block_list + bowl_list
# _ = env.reset(obj_list)
# lmp_tabletop_ui = setup_LMP(env, cfg_tabletop)# # display env
# cv2_imshow(cv2.cvtColor(env.get_camera_image(), cv2.COLOR_BGR2RGB))# print('available objects:')
# print(obj_list)二、可直接下载修改后的项目
MrQiguan/J_Embodied-AI-simulators![]() https://gitee.com/mrqiguan/j_-embodied-ai-simulators
https://gitee.com/mrqiguan/j_-embodied-ai-simulators
git clone https://gitee.com/mrqiguan/j_-embodied-ai-simulators/tree/master三、配置环境
(1)安装jupyterlab以及内核
pip install jupyterlab
pip install jupyterlab-language-pack-zh-CNpip install ipykernel
python -m ipykernel install --user --name=Embodied_AI_simulators(2)安装ffmpeg
conda install -c conda-forge ffmpeg=7.1.1
which ffmpeg # 记住这个位置,如:/home/nq123/anaconda3/envs/Embodied_AI_simulators/bin/ffmpeg(3)配置环境(重要)
第一、在Embodied_AI_simulators的终端,打开jupyter lab
第二、在jupyterlab右上角,切换内核Embodied_AI_simulators
第三、在代码里,修改Setup的内容,并保存!!!
os.environ["FFMPEG_BINARY"] = "/home/nq123/anaconda3/envs/Embodied_AI_simulators/bin/ffmpeg" # 修改1:ffmpeg位置
client = OpenAI(api_key='sk-xxx', base_url="xxx") # 修改2:api
第四、关闭jupyter lab!!!四、运行项目
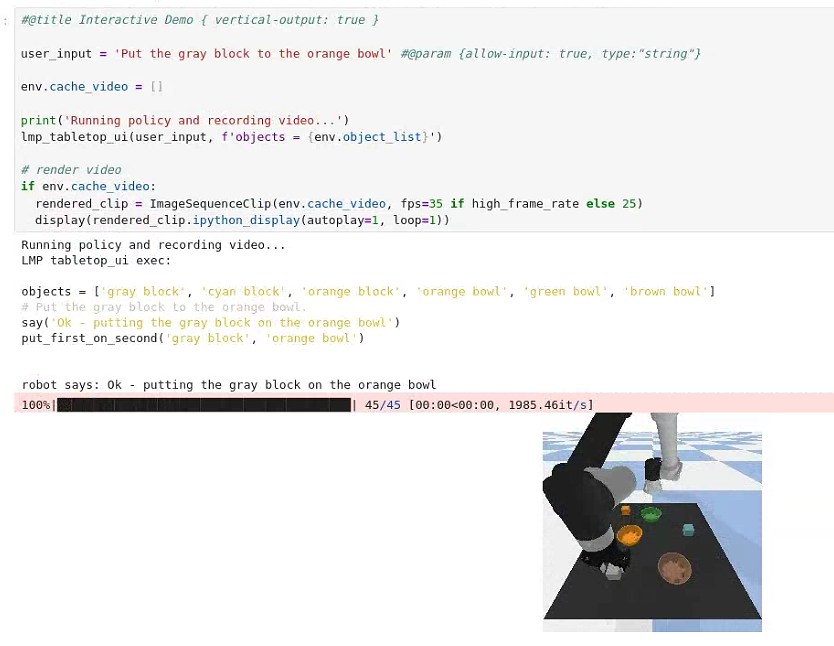
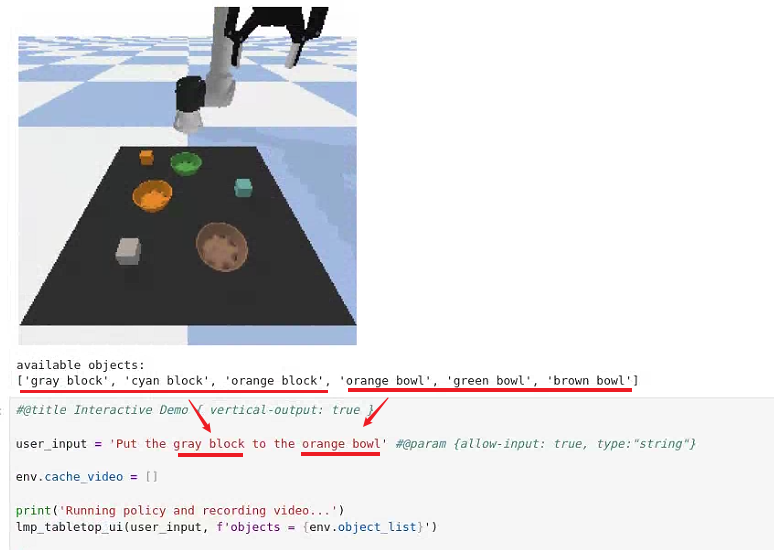
在Embodied_AI_simulators的终端,重新打开jupyter lab,依次运行代码。
注意:在Interactive Tabletop Manipulation,根据图片的物体列表,修改描述(如下图),继续运行代码即可
如遇报错:
Traceback (most recent call last)
Cell In[22], line 13
11 if env.cache_video:
12 rendered_clip = ImageSequenceClip(env.cache_video, fps=35 if high_frame_rate else 25)
---> 13 display(rendered_clip.ipython_display(autoplay=1, loop=1))
重新打开jupyter lab,再运行代码
最终效果