抢占式环境下,操作系统完全决定任务调度方案,操作系统可以剥夺当前任务对处理器的使用,将处理器提供给其它任务 。
这里就是利用前面设计的硬件定时器中断,每个任务定时运行一段时间,触发中断,切换任务。
同时考虑兼容协作式多任务中,出现任务完成但定时还没到,主动放弃任务的功能。
8.1 抢占式多任务的设计

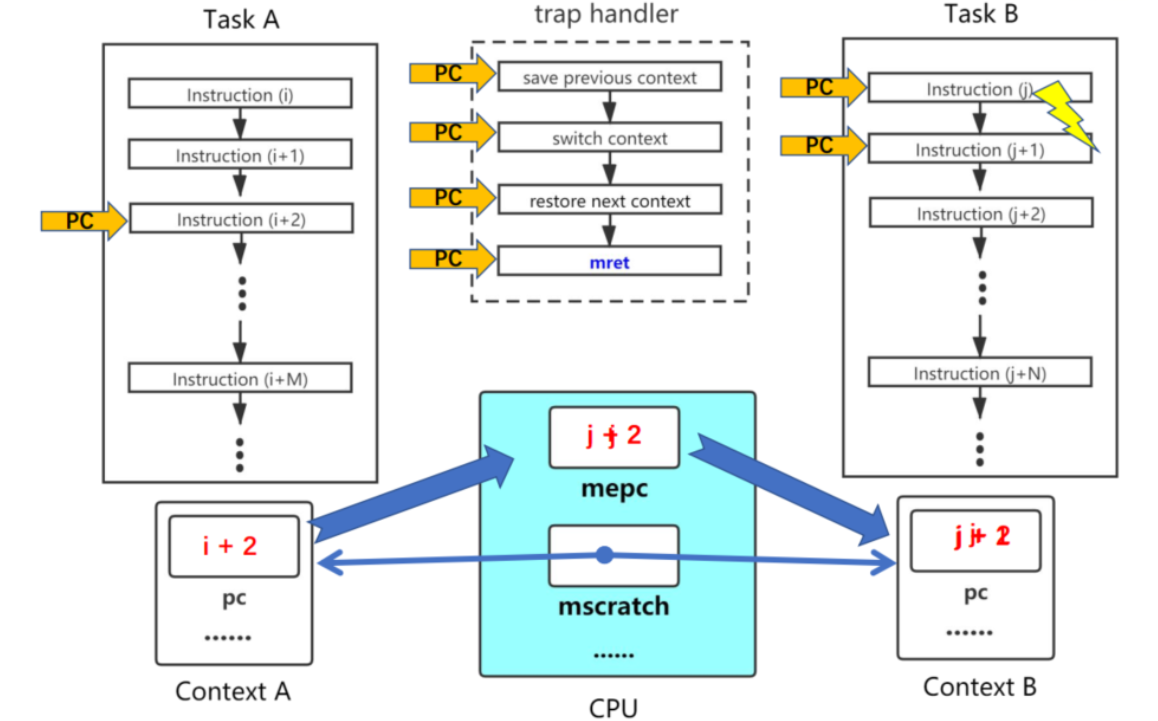
保存的context中增加了保存epc寄存器(记录任务切换时,当时的下一条指令地址,作为下一次切换回来的标记----因为是当前指令执行完,再跳转到中断处理函数)
/* task management */
struct context {/* ignore x0 */reg_t ra;reg_t sp;reg_t gp;reg_t tp;reg_t t0;reg_t t1;reg_t t2;reg_t s0;reg_t s1;reg_t a0;reg_t a1;reg_t a2;reg_t a3;reg_t a4;reg_t a5;reg_t a6;reg_t a7;reg_t s2;reg_t s3;reg_t s4;reg_t s5;reg_t s6;reg_t s7;reg_t s8;reg_t s9;reg_t s10;reg_t s11;reg_t t3;reg_t t4;reg_t t5;reg_t t6;/* save the pc(fact is epc) to run in next schedule cycle* offset: 31 * sizeof(reg_t)*/reg_t pc; };
仍然是使用**struct** context ctx_tasks[MAX_TASKS];保存任务上下文;静态变量,并且没有显式初始化,那么它会存储在 BSS 段中。这是因为 BSS 段用于存储未初始化的全局和静态变量。
编译的时候由 ld 分配的,栈区保存函数调用上下文,context区(指struct** context ctx_tasks[MAX_TASKS])固定大小,保存每一个任务的上下文,context区是实现任务调度时,保存原任务执行位置和寄存器信息的.
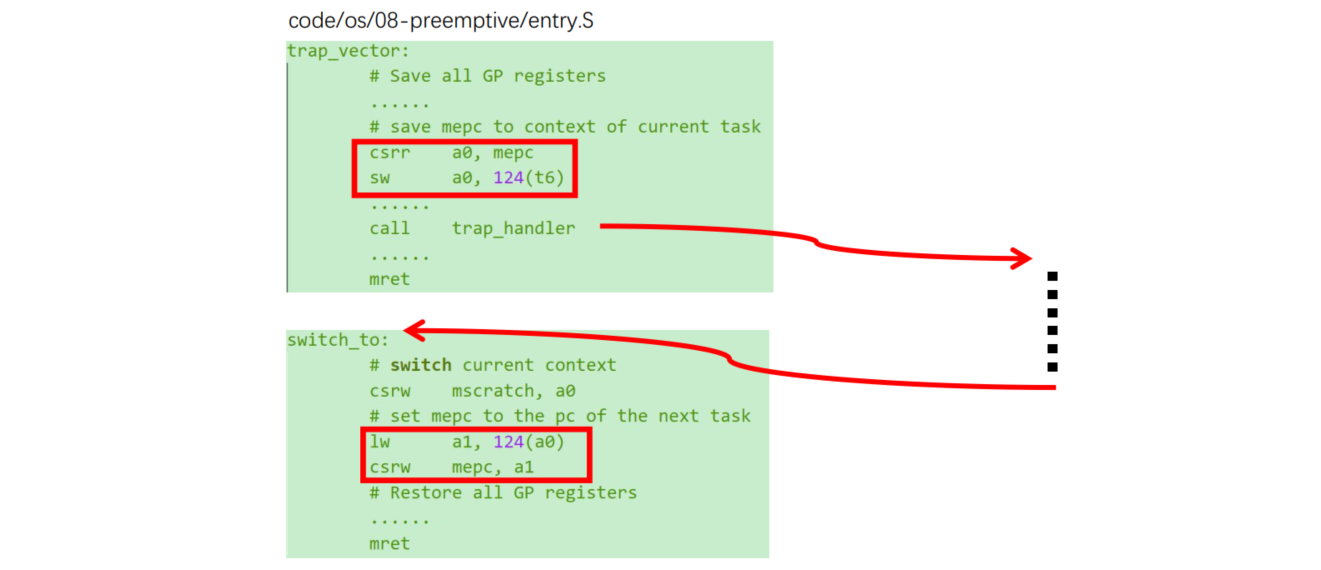
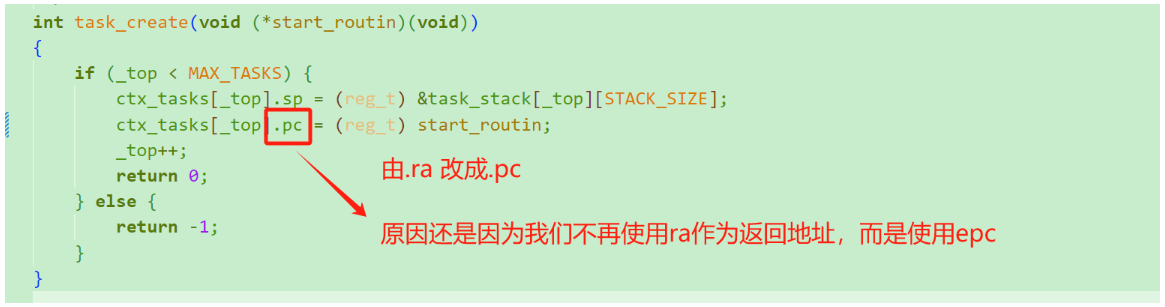
**注意!!!:**原本是使用ra寄存器返回,现在是使用mepc寄存器。所以随后也是使用mret指令而不是ret指令。
# interrupts and exceptions while in machine mode come here.
# the trap vector base address must always be aligned on a 4-byte boundary
.globl trap_vector
.balign 4trap_vector:# save context(registers).csrrw t6, mscratch, t6 # swap t6 and mscratchreg_save t6# Save the actual t6 register, which we swapped into# mscratchmv t5, t6 # t5 points to the context of current taskcsrr t6, mscratch # read t6 back from mscratchSTORE t6, 30*SIZE_REG(t5) # save t6 with t5 as base# save the return address to context of current task# save mepc to context of current taskcsrr a0, mepcSTORE a0, 31*SIZE_REG(t5)# Restore the context pointer into mscratchcsrw mscratch, t5# call the C trap handler in trap.ccsrr a0, mepccsrr a1, mcausecall trap_handler# trap_handler will return the return address via a0.csrw mepc, a0# restore context(registers).csrr t6, mscratchreg_restore t6# return to whatever we were doing before trap.mret触发中断时不仅保存当前任务的上下文,还保存epc到context中的pc位置:(epc的值是硬件在陷入时候自动赋值)

还有这里,这里错误找了一晚上!!!哎。
还有start.S中下面部分做出更改:
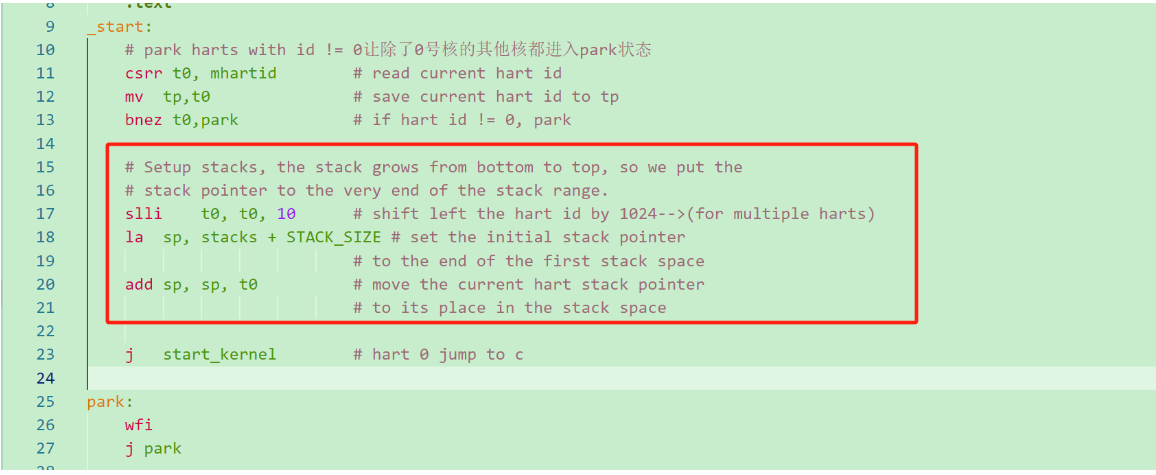
改成下面;
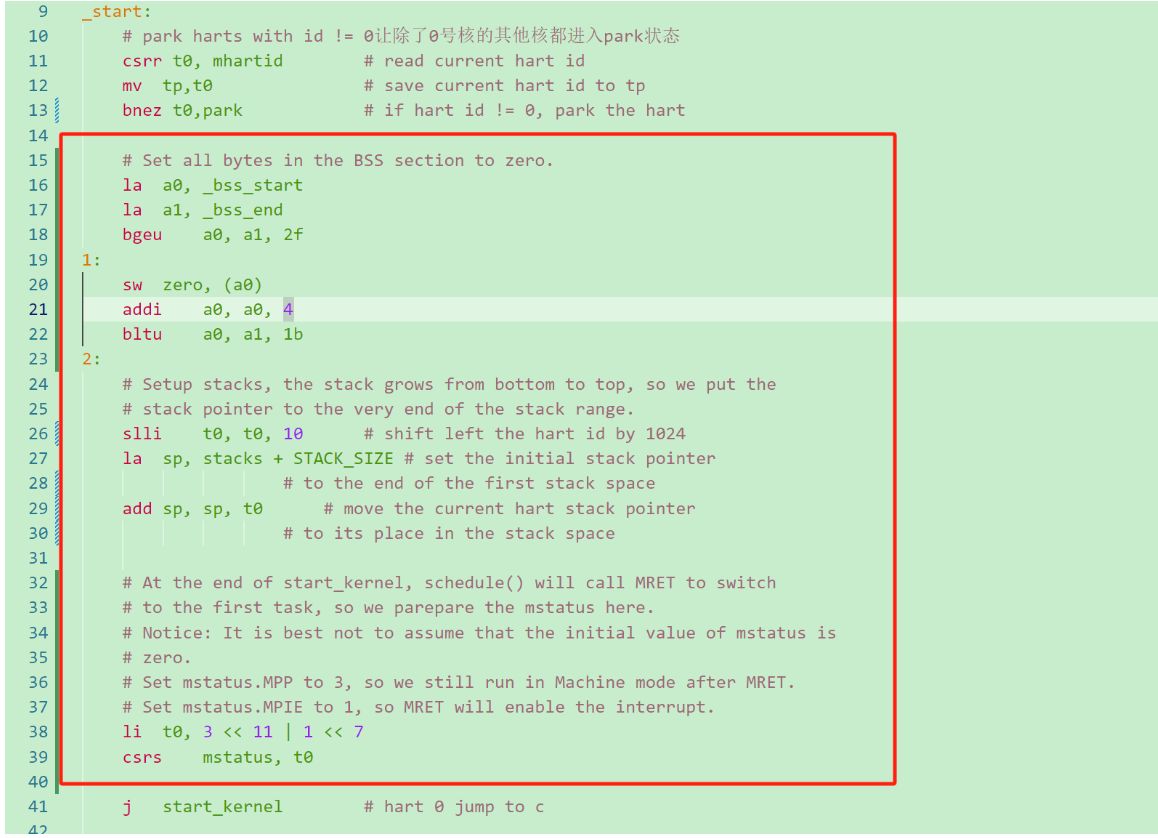
- 初始化 BSS 段:将 BSS 段的内存清零。
- 设置栈指针:为每个核心的栈指针初始化到栈空间的末尾。
- 设置
mstatus寄存器:确保在切换到第一个任务后,处理器仍然运行在机器模式并启用中断。
这里区分两种方式的代码:
- 协作式:
.globl switch_to
.balign 4
switch_to:csrrw t6, mscratch, t6 # swap t6 and mscratchbeqz t6, 1f # Note: the first time switch_to() is# called, mscratch is initialized as zero# (in sched_init()), which makes t6 zero,# and that's the special case we have to# handle with t6reg_save t6 # save context of prev task# Save the actual t6 register, which we swapped into mscratchmv t5, t6 # t5 points to the context of current taskcsrr t6, mscratch # read t6 back from mscratchSTORE t6, 30*SIZE_REG(t5) # save t6 with t5 as base1:# switch mscratch to point to the context of the next taskcsrw mscratch, a0# Restore all GP registers# Use t6 to point to the context of the new taskmv t6, a0reg_restore t6# Do actual context switching.ret
- 抢占式:
.globl switch_to
.balign 4
switch_to:# switch mscratch to point to the context of the next taskcsrw mscratch, a0# set mepc to the pc of the next taskLOAD a1, 31*SIZE_REG(a0)csrw mepc, a1# Restore all GP registers# Use t6 to point to the context of the new taskmv t6, a0reg_restore t6# Do actual context switching.# Notice this will enable global interruptmret
8.2 兼容协作式多任务---- 软中断(software interrupt)
主要目的是考虑兼容协作式多任务中,出现任务完成但定时还没到,主动放弃任务的功能。
/** DESCRIPTION* task_yield() causes the calling task to relinquish the CPU and a new * task gets to run.*/
void task_yield()
这里使用软中断,主动触发,通知Hart进行陷入处理。
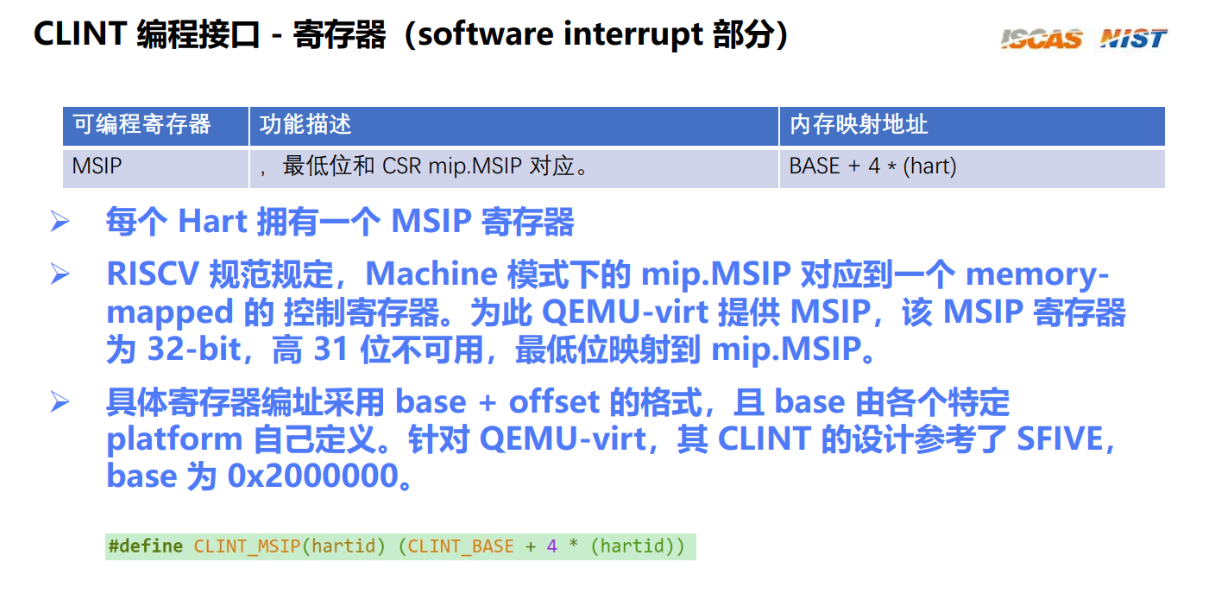
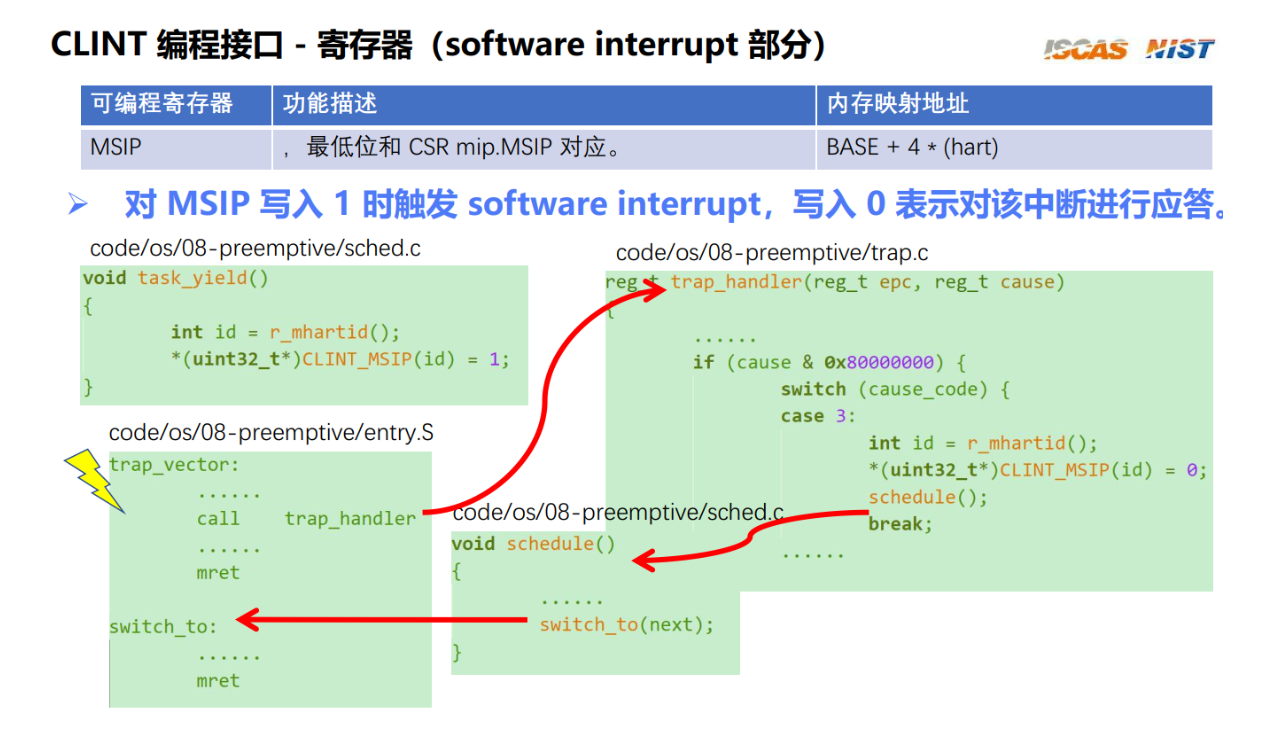
在RISC-V架构中,软中断(software interrupt)通常是由写特定的寄存器来触发的,例如MSIP(Machine Software Interrupt Pending)。在你的示例中,通过向MSIP写入1来触发软件中断,写入0来清除中断标志。
为了实现对不同软中断触发原因执行相应的操作,你可以在中断处理程序中检查引发中断的具体原因,并根据这个原因调用不同的处理函数。这通常涉及到对
cause寄存器中的值进行解码,以确定是哪个软中断被触发。以下是如何设计这种机制的步骤:
1. 定义软中断类型
定义不同的软中断类型,这些类型将对应于不同的操作。
typedef enum {INT_SCHEDULE,INT_SHUTDOWN,INT_REBOOT,// 其他软中断类型 } SoftInterruptType;2. 设置软中断标志
为每种软中断类型设置一个标志,这些标志存储在某个内存位置,中断处理程序将检查这些标志。
volatile uint32_t software_interrupt_flags = 0;void trigger_soft_interrupt(SoftInterruptType type) {// 假设我们用不同的位来表示不同的软中断类型software_interrupt_flags |= (1 << type); }3. 编写中断处理程序
编写一个中断处理程序,该程序检查哪些软中断标志被设置,并执行相应的操作。
void handle_soft_interrupts() {if (software_interrupt_flags & (1 << INT_SCHEDULE)) {// 执行调度操作schedule();software_interrupt_flags &= ~(1 << INT_SCHEDULE); // 清除标志}if (software_interrupt_flags & (1 << INT_SHUTDOWN)) {// 执行关机操作shutdown();software_interrupt_flags &= ~(1 << INT_SHUTDOWN); // 清除标志}if (software_interrupt_flags & (1 << INT_REBOOT)) {// 执行重启操作reboot();software_interrupt_flags &= ~(1 << INT_REBOOT); // 清除标志}// 处理其他软中断类型 }4. 集成到中断处理流程
将软中断处理程序集成到你的中断处理流程中,确保当中断发生时调用该处理程序。
void trap_handler(reg_t epc, reg_t cause) {if (cause & 0x8000000000000000L) { // 检查是否为中断if (cause == CAUSE_MACHINE_SOFT) { // 检查是否为软中断handle_soft_interrupts();}// 处理其他类型的中断...}// 处理异常... }通过这种方式,当中断发生时,你的系统可以检查是哪种软中断被触发,并执行相应的操作。这种方法允许你对不同的软中断触发原因做出不同的响应,而不是执行相同的操作。希望这次的解释更加清晰地回答了你的问题!如果还有其他疑问,请继续提问。