- homework1
- homework2
- homework3
homework1
- 简述 当代主流的并行机系统。
【答】
当代并行机系统主要有:
1) 并行向量机(PVP)
2) 对称多处理机(SMP)
3) 大规模并行处理机(MPP)
4) 分布式共享存储(DSM)处理机
5) 工作站机群(COW)
- 简述 并行计算机的主要访存模型。
【答】
1)均匀存储访问模型(UMA)
2)非均匀存储访问模型(NUMA)
3)全高速缓存存储访问模型(COMA)
4)高速缓存一致性非均匀访问模型(CC-NUMA)
5)非远程存储访问模型(NORMA)
- 使用 4GHZ 主频的标量处理器执行一个典型测试程序,其所执行的指令数及所需的周期数如下表所示。试 计算执行该程序的有效 CPI、MIPS 速率及总的 CPU 执行时间。
| 指令类型 | 指令数 | 时钟周期数 |
|---|---|---|
| 整数算术 | 45,000 | 1 |
| 数据传送 | 32,000 | 2 |
| 浮点 | 15,000 | 2 |
| 控制转移 | 8,000 | 2 |
【解】
C P I = 执行整个程序所需的时钟周期数 程序中指令总数 CPI = \frac{执行整个程序所需的时钟周期数}{程序中指令总数} CPI=程序中指令总数执行整个程序所需的时钟周期数,即:
C P I = ∑ i = 1 n ( C P I i × I i ) I N = 45000 × 1 + 32000 × 2 + 15000 × 2 + 8000 × 2 45000 + 32000 + 15000 + 8000 = 1.55 \begin{aligned}\\ CPI &= \frac{\sum_{i=1}^n(CPI_i \times I_i)}{I_N} \\\\ &= \frac{45000 \times 1+32000 \times 2+15000 \times 2+ 8000 \times 2}{45000+32000+15000+8000} \\\\ &= 1.55\\ \end{aligned} CPI=IN∑i=1n(CPIi×Ii)=45000+32000+15000+800045000×1+32000×2+15000×2+8000×2=1.55
时钟频率 R C R_C RC 为 4 G H z = 4 × 1 0 9 H z 4GHz=4\times10^9Hz 4GHz=4×109Hz, M I P S MIPS MIPS (每秒百万条指令)为:
M I P S = R C C P I × 1 0 6 = 4 × 1 0 9 1.55 × 1 0 6 = 2580.7 \begin{aligned}\\ MIPS &= \frac{R_C}{CPI \times 10^6} \\\\ &= \frac{4 \times 10^9}{1.55\times10^6} \\\\ &= 2580.7\\ \end{aligned} MIPS=CPI×106RC=1.55×1064×109=2580.7
C P U 执行时间 = 总时钟周期数 × 时钟周期 = 总时钟周期数 时钟频率 CPU 执行时间 = 总时钟周期数 \times 时钟周期 = \frac{总时钟周期数}{时钟频率} CPU执行时间=总时钟周期数×时钟周期=时钟频率总时钟周期数,即:
T C P U = T C R C = 45000 × 1 + 32000 × 2 + 15000 × 2 + 8000 × 2 4 × 1 0 9 = 3.875 × 1 0 − 5 s \begin{aligned}\\ T_{CPU} &= \frac{T_C}{R_C} \\\\ &= \frac{45000 \times 1+32000 \times 2+15000 \times 2+ 8000 \times 2}{4\times10^9} \\\\ &= 3.875\times10^{-5}s\\ \end{aligned} TCPU=RCTC=4×10945000×1+32000×2+15000×2+8000×2=3.875×10−5s
-
欲在 4GHZ 主频的标量处理器上执行20万条目标代码指令程序。假定该程序中含有4种主要类型之指令,各指令所占的比例及 CPI 数如下表所示,试计算:
①在 单处理机上执行该程序的平均 CPI。
②由①所得结果,计算相应的 MIPS 速率。
| 指令类型 | CPI | 指令所占比例 |
|---|---|---|
| ALU | 1 | 60% |
| LOAD/STORE(高速缓存命中) | 2 | 18% |
| 分支 | 4 | 12% |
| 访存(高速缓存缺失) | 8 | 10% |
【解】
(1)
C P I = 1 × 60 % + 2 × 18 % + 4 × 12 % + 8 × 10 % = 2.24 \begin{aligned}\\ CPI &= 1 \times 60\% + 2 \times 18\% + 4 \times 12\% + 8 \times 10\% \\\\ &= 2.24\\ \end{aligned} CPI=1×60%+2×18%+4×12%+8×10%=2.24
(2)
M I P S = R C C P I × 1 0 6 = 4 × 1 0 9 2.24 × 1 0 6 = 1785.7 \begin{aligned}\\ MIPS &= \frac{R_C}{CPI \times 10^6} \\\\ &= \frac{4\times10^9}{2.24\times10^6} \\\\ &= 1785.7\\ \end{aligned} MIPS=CPI×106RC=2.24×1064×109=1785.7
- 已知 SP2 并行计算机的通信开销表达式 t ( m ) = 46 + ( 0.035 ) m t(m) = 46+(0.035)m t(m)=46+(0.035)m,计算 渐进带宽和半峰值信息长度,提示 t 0 = 46 u s t_0=46us t0=46us。
【答】
渐进带宽 r ∞ = 1 0.035 = 28.6 M B / s r_{\infty}=\frac{1}{0.035}=28.6 \ MB/s r∞=0.0351=28.6 MB/s
半峰值信息长度 m 1 2 = t 0 × r ∞ = 46 u s × 28.6 M B / s = 1315.6 B m_{\frac{1}{2}}=t_0\times r_{\infty}=46us \times 28.6MB/s=1315.6B m21=t0×r∞=46us×28.6MB/s=1315.6B
- 为什么增加问题规模可以在一定程度提高 加速比?
【答】
1)较大的问题规模可提高较大的并发度。
2)额外开销的增加可能慢于有效计算的增加。
3)算法中的串行分量比例不是固定不变的(串行部分所占的比例随着问题规模的增大而缩小)。
- 请简要描述以下共享存储并行代码中为何需要三次 Barrier?如何改进。

【答】
代码中的 barrier 函数调用是同步点,每个 barrier 都是必要的,它们确保了在关键的计算步骤之间所有线程的同步,防止数据冲突和不一致的结果。
- 第一次
barrier用于等待所有线程都完成初始化,确保全局变量diff在for循环计算之前为0.f。 - 第二次
barrier用于等待所有线程都累加到全局变量diff,每一轮迭代中,diff是所有线程的myDiff变量之和。 - 第三次
barrier用于等待所有线程检查是否满足了收敛条件,确保每个线程对全局变量done的操作相同。
通过在连续的循环迭代中使用不同的 d i f f diff diff 变量来删除依赖关系,权衡占用空间以消除依赖关系(一种常见的并行计算技巧)。
改进如下:
int n; // grid size
bool done = false;
LOCK myLock;
BARRIER myBarrier;
float diff[3]; // global diff, but now 3 copiesfloat *A = allocate(n+2, n+2);void solve(float* A) {float myDiff; // thread local variableint index = 0; // thread local variablediff[0] = 0.0f;barrier(myBarrier, NUM_PROCESSORS); // one-time only: just for initwhile (!done) {myDiff = 0.0f;// 这里不再需要 barrier 确保全局 diff 初始化为 0.f//// perform computation (accumulate locally into myDiff)//lock(myLock);diff[index] += myDiff; // atomically update global diffunlock(myLock);diff[(index+1) % 3] = 0.0f;barrier(myBarrier, NUM_PROCESSORS); // 这个barrier既等待全局diff[index]的值,又初始化全局diff[(index+1)%3]的值为0.fif (diff[index]/(n*n) < TOLERANCE) break;// 这里不再需要barrier确保各线程对全局done进行相同操作,直接breakindex = (index + 1) % 3;}
}
homework2
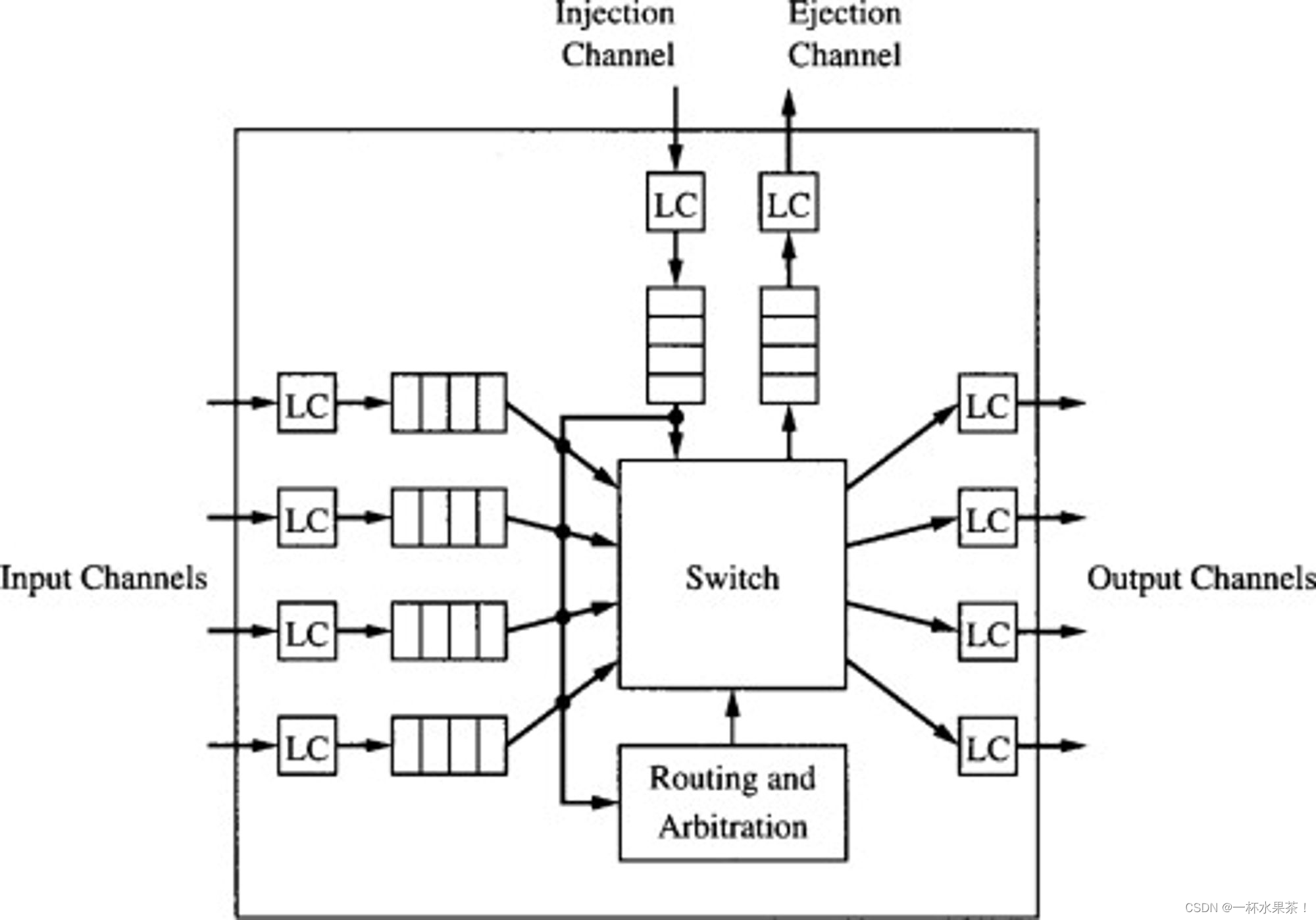
- 修改课本中的 基本路由器模型,使其只使用输入缓冲并且没有虚通道。针对该路由器模型,重写虫孔交换和报文交换的基本延迟表达式。
【答】
基本延迟表达式如下,
t 虫孔 = D ( t r + t s + t w ) + ( t s + t w ) ⌈ L W ⌉ t 报文 = D [ t r + ( t s + t w ) ⌈ L + W W ⌉ ] \begin{aligned}\\ t_{虫孔} &= D(t_r+t_s+t_w)+(t_s+t_w)⌈\frac{L}{W}⌉ \\\\ t_{报文} &= D[t_r+(t_s+t_w)⌈\frac{L+W}{W}⌉]\\ \end{aligned} t虫孔t报文=D(tr+ts+tw)+(ts+tw)⌈WL⌉=D[tr+(ts+tw)⌈WL+W⌉]
- 写出二维网格中 最小北最后算法。
算法:二维网格中最小北向最后算法
输入:当前节点的坐标(Xcurrent,Ycurrent)和目标节点的坐标(Xdest,Ydest)
输出:选择的输出通道Channel
过程:Xoffest := Xdest - Xcurrent;Yoffset := Ydest - Ycurrernt;If Xoffset < 0 and Yoffset >= 0 then Channel := X-;endifIf Xoffset < 0 and Yoffset < 0 thenChannel := Select (X-, Y-); // Select 选择函数,从通道中选择一个空闲的通道endifIf Xoffset › 0 and Yoffset >= 0 thenChannel := X+;endifif Xoffset > 0 and Yoffset < 0 thenChannel := Select (X+, Y-);endifIf Xoffset = 0 and Yoffset > 0 thenChannel := Y+;endifif Xoffset = 0 and Yoffset < 0 thenChannel := Y-;endifIf Xoffset = 0 and Yoffset = 0 then Channel := Internal; // Internal 是连接本地节点的通道endif
- 采用 转弯模型,针对 三维网格给出最短路径部分自适应路由算法,使这些算法具有尽可能少的路由限制。
算法:三维网格最短路径部分自适应路由算法
输入:当前节点坐标(Xcurrent,Ycurrent,Zcurrent)和目的节点坐标(Xdest,Ydest,Zdest)
输出:选择的输出通道Channel
过程:
Xoffset := Xdest - Xcurrent;
Yoffset := Ydest - Ycurrent;
Zoffset := Zdest - Zcurrent;
if (Xoffset && Yoffset && Zoffset){随机选取第S维while(Soffset > 0) Channel := S+;while(Soffset < 0) Channel := S-;在剩下的二维平面中做西向优先路由;
} else存在第S维,使 Soffset = 0 成立,在剩下的二维平面中做西向优先路由;
RETURN;
- 给出 蝶式 MIN 中可以建立 无冲突路径的充要条件。
【答】
在蝶形 MIN 中, t i = d i + 1 ( 0 ≤ i ≤ n − 2 ) , t n − 1 = d 0 t_i=d_{i+1}(0≤i≤n-2),t_{n-1}=d_0 ti=di+1(0≤i≤n−2),tn−1=d0,
如果要对于任意两个输入/输出对 ( S , D ) (S,D) (S,D) 和 ( R , T ) (R,T) (R,T) 建立无冲突的两条路径,其充要条件为:
对于任意的 i i i 都有 s n − 1 s n − 2 … s i + 1 d i d i − 1 d i − 2 … d 2 d 1 d i + 1 s_{n-1}s_{n-2}…s_{i+1}d_id_{i-1}d_{i-2}…d_2d_1d_{i+1} sn−1sn−2…si+1didi−1di−2…d2d1di+1 不等于 r n − 1 r n − 2 … r i + 1 t i t i − 1 t i − 2 … t 2 t 1 t i + 1 r_{n-1}r_{n-2}…r_{i+1}t_it_{i-1}t_{i-2}…t_2t_1t_{i+1} rn−1rn−2…ri+1titi−1ti−2…t2t1ti+1。
- 给出 立方体网络中的自路由标记。
【答】
立方网络: C i C_i Ci 为第 n − i n-i n−i 个蝶形排列( i = 1 , 2 , … , n i=1,2,…, n i=1,2,…,n) , C 0 C_0 C0 为完全混洗排列。
考虑从 S n − 1 S n − 2 … S 1 S 0 S_{n-1}S_{n-2}…S_1S_0 Sn−1Sn−2…S1S0 到 D n − 1 D n − 2 … D 1 D 0 D_{n-1}D_{n-2}…D_1D_0 Dn−1Dn−2…D1D0 建立一条电路,
经过第 0 级链路: S n − 1 S n − 2 … S 1 S 0 → S n − 2 S n − 3 … S 1 S 0 S n − 1 S_{n-1}S_{n-2}…S_1S_0 \rightarrow S_{n-2}S_{n-3}…S_1S_0S_{n-1} Sn−1Sn−2…S1S0→Sn−2Sn−3…S1S0Sn−1
作为第 0 级开关的输入地址,经过第 0 级开关 S n − 2 S n − 3 … S 1 S 0 S n − 1 → S n − 2 S n − 3 … S 1 S 0 S n − 1 ’ S_{n-2}S_{n-3}…S_1S_0S_{n-1} \rightarrow S_{n-2}S_{n-3}…S_1S_0S_{n-1}^{’} Sn−2Sn−3…S1S0Sn−1→Sn−2Sn−3…S1S0Sn−1’
经过第 1 级链路: S n − 2 S n − 3 … S 1 S 0 S n − 1 ’ → S n − 1 ’ S n − 3 … S 1 S 0 S n − 2 S_{n-2}S_{n-3}…S_1S_0S_{n-1}^{’} \rightarrow S_{n-1}^{’}S_{n-3}…S_1S_0S_{n-2} Sn−2Sn−3…S1S0Sn−1’→Sn−1’Sn−3…S1S0Sn−2
作为第 1 级开关的输入地址,经过第 1 级开关 S n − 1 ’ S n − 3 … S 1 S 0 S n − 2 → S n − 1 ’ S n − 3 … S 1 S 0 S n − 2 ’ S_{n-1}^{’}S_{n-3}…S_1S_0S_{n-2} \rightarrow S_{n-1}^{’}S_{n-3}…S_1S_0S_{n-2}^{’} Sn−1’Sn−3…S1S0Sn−2→Sn−1’Sn−3…S1S0Sn−2’
经过第 2 级链路: S n − 1 ’ S n − 3 … S 1 S 0 S n − 2 ’ → S n − 1 ’ S n − 2 ’ … S 1 S 0 S n − 3 S_{n-1}^{’}S_{n-3}…S_1S_0S_{n-2}^{’} \rightarrow S_{n-1}^{’}S_{n-2}^{’}… S_1S_0S_{n-3} Sn−1’Sn−3…S1S0Sn−2’→Sn−1’Sn−2’…S1S0Sn−3
作为第 2 级开关的输入地址,经过第 2 级开关 S n − 1 ’ S n − 2 ’ … S 1 S 0 S n − 3 → S n − 1 ’ S n − 2 ’ … S 1 S 0 S n − 3 ’ S_{n-1}^{’}S_{n-2}^{’}… S_1S_0S_{n-3} \rightarrow S_{n-1}^{’}S_{n-2}^{’}… S_1S_0S_{n-3}^{’} Sn−1’Sn−2’…S1S0Sn−3→Sn−1’Sn−2’…S1S0Sn−3’
类似的有第 i i i 级开关的输出为 S n − 1 ’ S n − 2 ’ … S n − i ’ S n − i − 2 … S 1 S 0 S n − i − 1 → S n − 1 ’ S n − 2 ′ … S n − i ’ S n − i − 2 … S 1 S 0 S n − i − 1 ’ S_{n-1}^{’}S_{n-2}^{’}…S_{n-i}^{’}S_{n-i-2}…S_1S_0S_{n-i-1} \rightarrow S_{n-1}^{’}S_{n-2}^{'}…S_{n-i}^{’}S_{n-i-2}…S_1S_0S_{n-i-1}^{’} Sn−1’Sn−2’…Sn−i’Sn−i−2…S1S0Sn−i−1→Sn−1’Sn−2′…Sn−i’Sn−i−2…S1S0Sn−i−1’
从而第 n − 1 n-1 n−1 级开关的输出为 S n − 1 ’ S n − 2 ’ … … S 1 ’ S 0 ’ S_{n-1}^{’}S_{n-2}^{’}……S_1^{’}S_0^{’} Sn−1’Sn−2’……S1’S0’
最后一级连接为恒等排列,所以 S n − 1 ’ S n − 2 ’ … … S 1 ’ S 0 ’ = d n − 1 d n − 2 … d 1 d 0 S_{n-1}^{’}S_{n-2}^{’}……S_1^{’}S_0^{’}=d_{n-1}d_{n-2}…d_1d_0 Sn−1’Sn−2’……S1’S0’=dn−1dn−2…d1d0
从而有 S i ’ = d i S_i^{’}=d_i Si’=di
所以第 i i i 级开关的输出为 d n − 1 d n − 2 … d n − i S n − i − 2 … S 1 S 0 d n − i − 1 d_{n-1}d_{n-2}…d_{n-i}S_{n-i-2}…S_1S_0d_{n-i-1} dn−1dn−2…dn−iSn−i−2…S1S0dn−i−1
在立方网络中,第 i i i v级开关最低有效位为第 n − i − 1 n-i-1 n−i−1 位,并且最终映射到的目标地址中的对应位为第 n − i − 1 n-i-1 n−i−1 位,所以 t i = d n − i − 1 , 0 ≤ i ≤ n − 1 ) t_i=d_{n-i-1}, 0 \leq i \leq n-1) ti=dn−i−1,0≤i≤n−1)
- 写出 XY 多播路由算法。
【答】
目的节点集 D ′ D^{'} D′,本地址 ( x , y ) (x,y) (x,y),
(1)若 x > m i n { x i ∣ ( x i , y i ) ∈ D ′ } x>min\{x_i|(x_i,y_i)∈D^{'}\} x>min{xi∣(xi,yi)∈D′} 则把消息和列表送到节点 ( x − 1 , y ) (x-1,y) (x−1,y);若 x < m a x { x i ∣ ( x i , y i ) ∈ D ′ } x<max\{x_i|(x_i,y_i)∈D^{'}\} x<max{xi∣(xi,yi)∈D′} 则把消息和列表送到节点 ( x + 1 , y ) (x+1,y) (x+1,y)。
(2)若 x ∈ { x i ∣ ( x i , y i ) ∈ D ′ x\in \{x_i|(x_i,y_i)∈D^{'} x∈{xi∣(xi,yi)∈D′,判断 y y y 的大小,若 y > m i n { y i ∣ ( x i , y i ) ∈ D ′ } y>min\{y_i|(x_i,y_i)∈D^{'}\} y>min{yi∣(xi,yi)∈D′} 则把消息和列表送到 ( x , y − 1 ) (x,y-1) (x,y−1);若 y < m a x { y i ∣ ( x i , y i ) ∈ D ′ } y<max\{y_i|(x_i,y_i)∈D^{'}\} y<max{yi∣(xi,yi)∈D′},则把消息和列表送到 ( x , y + 1 ) (x,y+1) (x,y+1)。
(3)若 ( x , y ) ∈ D ′ (x,y)\in D^{'} (x,y)∈D′, D ′ ← D ′ − ( x , y ) D^{'} \leftarrow D^{'}-(x,y) D′←D′−(x,y),并把消息送到本地节点。
- 给出 6X6 网格中 双路径和多路径多播路由的路径。源节点为(4,3),目标节点集为(0,0),(4,0),(5,1)(3,2)(0,2)(5,3)(0,3)(3,4)(1,5)(5,5)。
【答】
双路径多播路由图:

多路径多播路由图:

homework3
- 解释采用 WB 策略的写更新和写无效协议的一致性维护过程。其中 X X X 为更新前高速缓存中的拷贝, X ′ X^{'} X′ 为修改后的高速缓存块, I I I 为无效的高速缓存块。

【答】
处理器 P 1 P_1 P1 写共享变量 X X X 为 X ′ X^{'} X′,
写更新协议如图 © 所示,同时更新其他核中存在高速缓存拷贝的值为 X ′ X^{'} X′;
写无效协议如图 (b) 所示,无效其他核中存在高速缓存拷贝,从而维护了一致性过程。
-
两种 基于总线的共享内存多处理机 分别实现了 Illinois MESI 协议和 Dragon 协议,对于给定的每个内存存取序列,比较在这两种多处理机上的执行代价,并就序列及一致性协议的特点来说明为什么有这样的性能差别。
序列 ①
r1 w1 r1 w1 r2 w2 r2 w2 r3 w3 r3 w3;序列 ②
r1 r2 r3 w1 w2 w3 r1 r2 r3 w3 w1;序列 ③
r1 r2 r3 r3 w1 w1 w1 w1 w2 w3;所有的存取操作都针对同一个内存位置,r/w 代表读/写,数字代表发出该操作的处理器。假设所有高速缓存在开始时是空的,并且使用下面的性能模型:读/写高速缓存命中,代价 1 个时钟周期;缺失引起简单的总线事务(如 BusUpgr,BusUpd),60 个时钟周期;缺失引起整个高速缓存块传输,90 时钟周期。假设所有 高速缓存是写回式,并且 MESI 协议中使用 BusUpgr 事务。
【答】
读写命中、总线事务、块传输分别简记为 H H H、 B B B、 T T T。
MESI 协议:
①T H H H T B H H T B H H 共 2 B + 7 H + 3 T = 397 2B+7H+3T=397 2B+7H+3T=397 时钟周期
②T T T B T T T T H B T 共 2 B + 1 H + 8 T = 841 2B+1H+8T=841 2B+1H+8T=841 时钟周期
③T T T H B H H H T T共 1 B + 4 H + 5 T = 514 1B+4H+5T=514 1B+4H+5T=514 时钟周期。
Dragon协议:
①T H H H T B H B T B H B 共 4 B + 5 H + 3 T = 515 4B+5H+3T=515 4B+5H+3T=515 时钟周期
②T T T B B B H H H B B 共 5 B + 3 H + 3 T = 573 5B+3H+3T=573 5B+3H+3T=573 时钟周期
③T T T H B B B B B B 共 6 B + 1 H + 3 T = 631 6B+1H+3T=631 6B+1H+3T=631 时钟周期。
由结果得出,①、③ 序列用 MESI 协议时间更少,而 ② 序列用 Dragon 协议时间更少。
综上可知,如果同一块在写操作之后频繁被多个核读操作采用 Dragon 协议更好一些,因为 Dragon 协议写操作后会更新其它核副本。如果一个同多次连续对同一块进行写操作 MESI 协议更有效,因为它不需要更新其它核副本,只需要总线事务无效其它核即可。
-
考虑以下代码段,说明在 顺序一致性模型 下,可能的结果是什么?假设在代码开始执行
时,所有变量初始化为0。
a.
P1 P2 P3
A=1 U=A V=BB=1 W=Ab.
P1 P2 P3 P4
A=1 U=A B=1 W=BV=B X=A
【答】
顺序一致性模型性下,保护每个进程都按程序序来发生内存操作,这样会有多种可能结果,这里假设最简单情况,即 P 1 P_1 P1、 P 2 P_2 P2、 P 3 P_3 P3 依次进行。则 a 中 U = V = W = 1 U = V = W = 1 U=V=W=1,b 中 U = X = W = 1 U=X=W=1 U=X=W=1, V = 0 V=0 V=0。
-
针对以下高速缓存情况,试给出一个使得 高速缓存的包含性不满足 的内存存取序列?
L 1 L_1 L1 高速缓存容量 32 字节,2-路组相联,每个高速缓存块 8 个字节,使用 LRU 替换算法;
L 2 L_2 L2 高速缓存容量 128 字节,4-路组相联,每个高速缓存块 8 个字节,使用 LRU 替换算法。
【答】
假设 m 1 m_1 m1、 m 2 m_2 m2、 m 3 m_3 m3 块映射到一级 Cache 和二级 Cache 的同一组中,考虑如下内存存取序列 R m 1 R_{m_1} Rm1, R m 2 R_{m_2} Rm2, R m 1 R_{m_1} Rm1, R m 3 R_{m_3} Rm3,由 LRU 替换算法知道,当 R m 3 R_{m_3} Rm3 执行后, L 1 L_1 L1 中被替换出的是 m 2 m_2 m2, L 2 L_2 L2 中被替换出的是 m 1 m_1 m1,此时 m 1 m_1 m1 块在 L 1 L_1 L1 却不在 L 2 L_2 L2 中,不满足包含性。
- 利用 LL-SC 操作 实现一个 Test&Set 操作。
【答】
Test&Set:ll reg1,location /*Load-locked the location to reg1 */bnz reg1,lock /* if locatin was locked,try again*/mov reg2,1 /*set reg2to1*/sc location,reg2 /*store reg2 conditional into location*/