前言:海量数据处理是面试中一道常考的问题, 生活中也容易遇到这种问题。 通常就是有一个大文件, 让我们对这个文件进行一系列操作——找出现次数最多的数据、求交集、是否重复出现等等。 因为文件的内容太多, 我们的内存通常是放不下的。这个时候, 我们就要用到一些别的处理手段, 也就是我们的标题——位图, 布隆过滤器以及哈希切分。
本篇内容分为两个板块——第一个板块实现位图以及布隆过滤器; 第二个板块是大概模拟处理几道海量数据相关题。
ps:本篇的主要内容就是海量数据如何进行处理,但是需要使用位图和布隆过滤器的内容。 如果没有学过位图和布隆过滤器的友友们, 自行划到文章后面有位图和布隆过滤器的模拟实现。 已经学过的友友们就可以忽略后半部分的位图和布隆的部分, 只观看前半部分的海量数据处理部分。
海量数据处理
一、已知有100亿个int数据, 现在只有1G内存, 如何在这100个int数据里面找出出现次数为2的那些数据。
解:
整形先考虑位图:100亿个int, 但是这里面隐含了一个条件, 就是整形最多只有四十二亿九千万个。 就是160亿字节。 而10亿个字节为1G。 显然, 如果将所有整形放到内存中是放不下的。 但是我们不需要储存, 只需要查找哪个数据出现次数为2, 那么就可以利用位图和布隆过滤器优化空间。 而且数据类型是int, 那么就可以使用位图——一个整形映射一个比特位。
那么, 我们就要思考, 四十亿个整形可以映射5亿个字节, 也就是500MB。同时, 我们也要思考,位图只能标记出现过或者没有出现过, 但是不能标记出现过几次。 所以要使用两个位图——位图1, 位图2。 我们都知道位图的一个比特位置为1,代表数据出现过; 一个比特位置为0, 代表数据没有出现过。
那么如果有两个位图,我们就可以让这两个比特位合起来使用。 如果位图1的对应比特位为0, 位图2的对应比特位置为1,也就是01, 代表出现一次;如果位图1的对应比特位是1, 位图2的对应比特位是0, 那么就是10, 代表出现过2次。所以两个位图一共可以统计次数最多为3.
而使用两个位图所用空间最多为1G, 空间足够。 所以可是使用两个位图的策略。 具体实现如下:
template<size_t N>class bit_dou {public:void set(size_t x) {if (_bit1.test(x) == false && _bit2.test(x) == false) {_bit1.set(x);}else if (_bit1.test(x) == true && _bit2.test(x) == false) {_bit1.reset(x);_bit2.set(x);}else if (_bit1.test(x) == false && _bit2.test(x) == true) {_bit1.set(x);}}bool test(size_t x) {if (_bit2.test(x) == true) {return true;}else {return false;}}private:bitset<N> _bit1;bitset<N> _bit2;};
二、给两个文件,分别有100亿个query,我们只有1G内存,如何找到两个文件交集?分别给出精确算法和近似算法。
精确策略:这里使用的是hash映射 + 统计(使用哈希map或者map) + (堆/归并/快排)
具体步骤:
假设一个query50字节, 那么100亿个query就是5000亿字节,而10亿字节是1g, 那么5000亿字节就是500G, 所以1G内存不能将这些字符串全部存下来。
这里我们使用的策略是hash + 统计(使用hashmap或者treemap) + 堆排/归并/快排,先使用hash映射将100亿个query划分到500个小文件中, 着500个小文件分别命名为A1、A2、A3……A500——这样能保证平均1个小文件里面有1G内存。
然后将另一个文件也平均分成500个小文件, 这500个小文件命名为B1、B2、B3……B500——其实两个文件可以分的再多一些, 那样就能减少一个小文件映射的query太多的概率, 导致读取文件时内存空间不足。
使用hash映射到500个小文件中, 这时候我们可以确定, 相同的query一定会被映射到同一个文件中。 并且两个大文件中如果有相同的query,那么这个query在两个大文件形成的小文件中的下标一定是相同的。 比如一个q0在第一个大文件哈希映射的文件是A122, 那么他在另一个大文件中哈希映射的文件一定是B122。
那么我们就可以利用这种性质来判断这两组小文件的交集——即A1 和B1寻找交集,寻找出来后将交集放到一个文件中(最好不要放到内存, 因为如果交集很多, 可能导致内存不够。)A2和B2寻找交集后将交集放到一个文件中……A500和B500寻找交集放到一个文件中。
要注意的是应该考虑如果划分小文件的时候, 出现单个小文件个数太大。 那么也要分情况讨论:第一种情况就是单个小文件太大,但是其中重复的元素很少, 这个时候需要将元素全部映射到map之中空间不够用, 那么就要重新使用新的哈希函数, 重新映射。另一种情况就是虽然单个小文件很大, 但是其中重复的元素很多, 可以将全部元素映射到map之中。那么就正常读取小文件即可。
上面这种做法叫做哈希切分, 就是利用分治思想: 哈希映射 + hashmap/treemap (+ 堆/归并/快排)。
近似策略:使用布隆过滤器。
近似策略就是使用布隆过滤器, 先将一个大文件中的query映射到布隆过滤器当中, 然后再将另一个大文件的数据一个一个读取, 查找是否在当前布隆过滤器之中已经出现过。 如果出现过, 就保存下来。
最后保存下来的数据, 就是两个文件的交集。
三、给两个文件,分别有100亿个整数,我们只有1G内存,如何找到两个文件交集?
这个问题和第一个问题类似,都是使用位图。 100亿个整形其实里面最多只有42亿个不同的整形, 而四十二亿个整形使用位图映射后最多只需要使用400MB, 那么我们就可以使用位图先将一个大文件的数据映射进来, 然后再对另一个文件里面的数据一个一个读取, 查看是否在当前位图映射过。如果映射过, 那么就是交集。
四、给定100亿个整数,设计算法找到只出现一次的整数?
很明显就是使用位图的一个题, 同样的使用两个位图, 建立一个能够统计次数, 最高次数是3的位图(可以叫dou_bitMap)。 那么再统计这100亿个整形, 就能统计他们的出现次数。 最后再从0开始遍历四十二亿的整数, 判断这四十二亿个整数之中哪个出现过1次。
五、给一个超过100G大小的log file, log中存着IP地址, 设计算法找到出现次数最多的IP地址? 与上题条件相同,如何找到top K的IP?
log file明显不是整形, 那么这道题hash + 统计(hashmap/treemap) + 堆/归并/快排。
首先将100G的大文件利用hash函数切分成100个小文件。 再利用hashmap或者treemap将每个小文件中的出现最多的那个数据保存到一个文件中。 然后遍历这个文件就能找到出现次数最多的那个ip地址。
然后如何求topk的ip就要从遍历小文件的时候进行。 将每个小文件中的所有数据读到hashmap中统计其中数据出现的个数。 再利用排序将这些数据的出现个数从高到底排。 取出其中前k个ip放到一个文件之中。 所有的小文件都是上面这个操作。 最后使用一个含有k个数据的小堆。 依次遍历整个文件, 只要遇到比堆顶的数据大的, 就将数据放进堆里面。 然后弹出推顶数据, 维护堆的固定个数。最后堆中剩余的ip就是最大的k个ip。而堆顶就是topk的ip。
ps:这里总结的方法其实只有:bloomFilter/bitMap 以及 hash + 统计 + 堆/归并/快排; 另外还有几种处理海量数据的方法——外排序、多层划分、倒排索引等等。 这些博主知识储备不足, 在这里不好讲解, 有兴趣的友友可以按照自己的兴趣以及能力自行学习。
位图
学习位图之前首先要知道的一点就是位图, 布隆过滤器都是利用了哈希的思想。解决的是内存不够的问题。 就是说, 它们可以处理的数据更多。 更能节省空间。 但是也并不是只有优点,位图存在只能处理整形数据的问题。 而布隆过滤器存在不准确的问题。接下来实现位图:
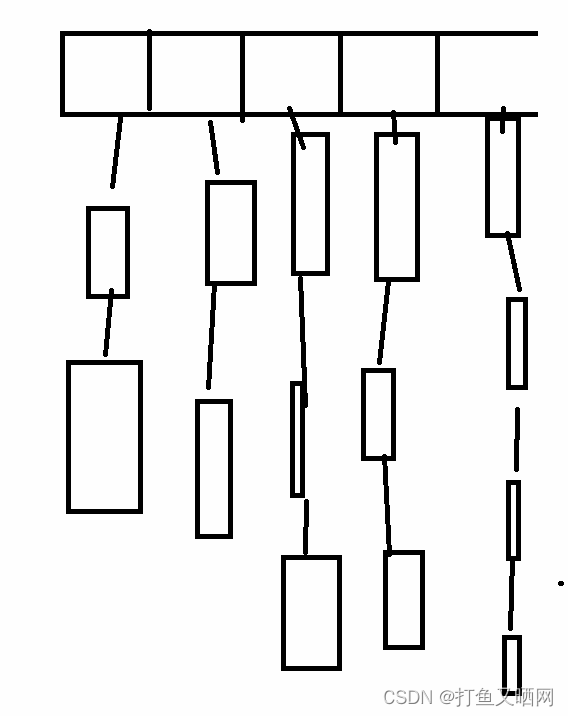
一般的哈希表像哈希桶, 闭散列。 都是利用一块空间来映射数据,同时需要开空间储存数据。如图位哈希桶图:
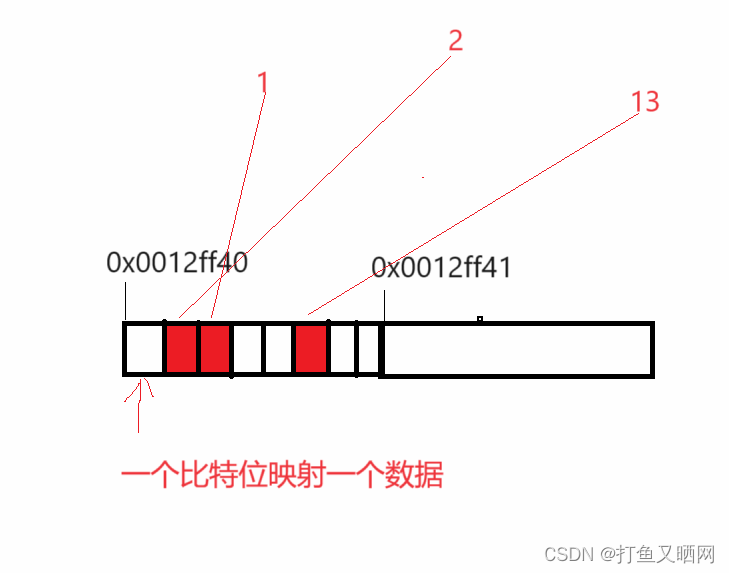
但是位图是利用一个比特位来映射数据,只用来映射, 不进行存储。如果改位置映射过, 就置为1(下图中的红代表1), 没映射过就是0(下图无色, 即默认值)。
//类的定义(要用模板size_t, 因为要指定位图的大小, 参数是几, 说明至少有多少数据, 就要保证最少开几个比特位空间。)
template<size_t n> //模板使用来规定创建的位图大小。 n是几, 就保证最少有几个比特位。class bitset {};//使用整形数组来模拟一块连续的空间
template<size_t n>class bitset {bitset() {//这里要保证开的空间足够, 但是n / 32会消除小数点,开的空间要小于等于需求。 所以要多开一个整形空间。_bits.resize(n / 32 + 1); }private:vector<int> _bits; //使用整型数组来模拟一块连续的空间。};//进行映射时, 如何定位第几个比特位
一个整形时4个字节, 32个比特位, 假设当前数据位x。 那么x / 32就是当前需要映射的第几个整形。而x % 32就是当前要映射的这个整形的第几个比特位。
当进行定位比特位时, 我们就可以这样写:
int i = x / 32; //要映射的第几个整形int j = x % 32; //要映射的第几个整形的第几个比特位。
//将当前比特位标记为1, 如何不修改其他比特位, 只将当前比特位置为1.
标记比特位要使用按位操作。 而按位操作分为按位与‘&’, 按位或'|', 按位异或'^'。 其中‘&’的规则是:有0就是0, 全1才是1; '|'的规则是:有1就是1, 全0才是0; '^'的规则是:相同为0, 相异为1。
这里可以使用'|‘操作, 先将1向高位移动 j 个位置。再让第 i 个整形按位或上1移动后的数。 就是想要的结果, 如图:
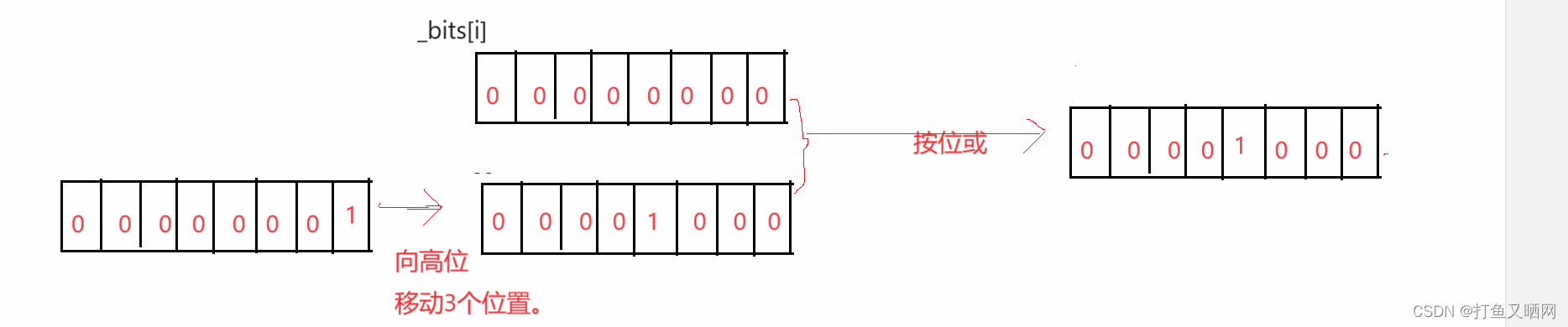
转化为代码就是如下, 这也是第一个接口(位图有三个接口, set, reset, test。该接口是set).
template<size_t n>class bitset {public:bitset() {//这里要保证开的空间足够, 但是n / 32会消除小数点,开的空间要小于等于需求。 所以要多开一个整形空间。_bits.resize(n / 32 + 1); }void set(int x) {int i = x / 32; //要映射的第几个整形int j = x % 32; //要映射的第几个整形的第几个比特位。_bits[i] |= (1 << j); //按位或:有1就是1, 全0才是0.}private:vector<int> _bits; //使用整型数组来模拟一块连续的空间。};//消除某一个比特位的映射(reset接口)
消除某一个位置的映射需要只将某一个比特位置为0, 其他的位置不变。如果是或操作, 就要让其他位置都是0, 但是并不能消除特定位置的1. 所以就要使用与操作, 让其他位置都是1, 特定位置都是0. 就能让特定位置由1变成0. 而其他位置与上1还是它本身, 代码如下:
template<size_t n>class bitset {public:bitset() {//这里要保证开的空间足够, 但是n / 32会消除小数点,开的空间要小于等于需求。 所以要多开一个整形空间。_bits.resize(n / 32 + 1); }void set(int x) {int i = x / 32; //要映射的第几个整形int j = x % 32; //要映射的第几个整形的第几个比特位。_bits[i] |= (1 << j); //按位或:有1就是1, 全0才是0.}void reset(int x) {int i = x / 32;int j = x % 32;_bits[i] &= ~(1 << j);}private:vector<int> _bits; //使用整型数组来模拟一块连续的空间。};//测试某一个数据有没有被映射过, 其实就是看某一个比特位有没有被映射过(test)
测试某一个位置有没有被映射过, 只需要让该位置与上1, 其他位置遇上0即可。 当其他位置与上0, 那么都变成0, 特定位置与上1, 如果这个位置原本是1, 那么结果就是1。 非0就是真, 如果该位置原本是0, 与上0之后也是零, 其他位置也是零。 所以结果就是0, 0为假。 代码如下:
template<size_t n>class bitset {public:bitset() {//这里要保证开的空间足够, 但是n / 32会消除小数点,开的空间要小于等于需求。 所以要多开一个整形空间。_bits.resize((n / 32) + 1, 0); }void set(int x) {int i = x / 32; //要映射的第几个整形int j = x % 32; //要映射的第几个整形的第几个比特位。_bits[i] |= (1 << j); //按位或:有1就是1, 全0才是0.}void reset(int x) {int i = x / 32;int j = x % 32;_bits[i] &= ~(1 << j);}bool test(int x) {int i = x / 32;int j = x % 32;return _bits[i] &= (1 << j);}private:vector<int> _bits; //使用整型数组来模拟一块连续的空间。};布隆过滤器
位图只能用来处理整形, 而布隆过滤器可以用来处理字符串。 弥补了位图只能用来处理整形的缺点。 但是因为字符串的个数太多,(首先长度不确定, ascii码中的字符就有128个。 如果是10位长, 就是128^10) 如果一个字符串可以利用哈希函数转化为一个整形,而字符串的个数远远超过了整形的个数(整型只有四十二亿九千万个)。那么根据鸽巢原理, 就一定会有两个不同的字符串被转化成了相同的整数。 这个时候结果就不准了, 所以布隆过滤器就使用了多个哈希函数, 将一个字符串来映射多个位置。 如图:
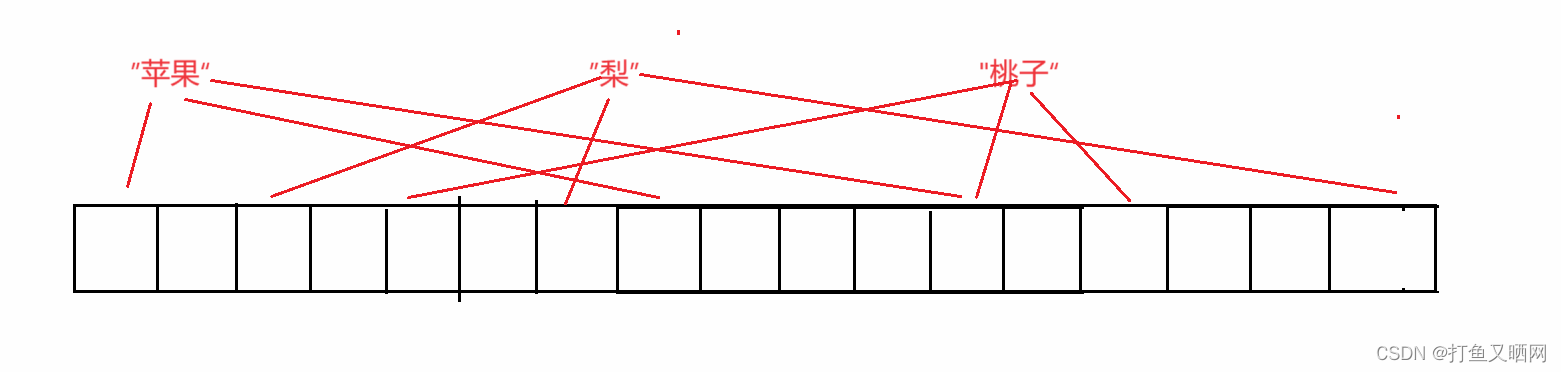
图中有三个字符串——苹果、梨、桃子。 同时每个字符串都有三个映射的位置, 并且苹果和桃子有一个哈希映射的位置相同。 如果这个时候再来一个西瓜, 我们要查找一下西瓜存在不存在。
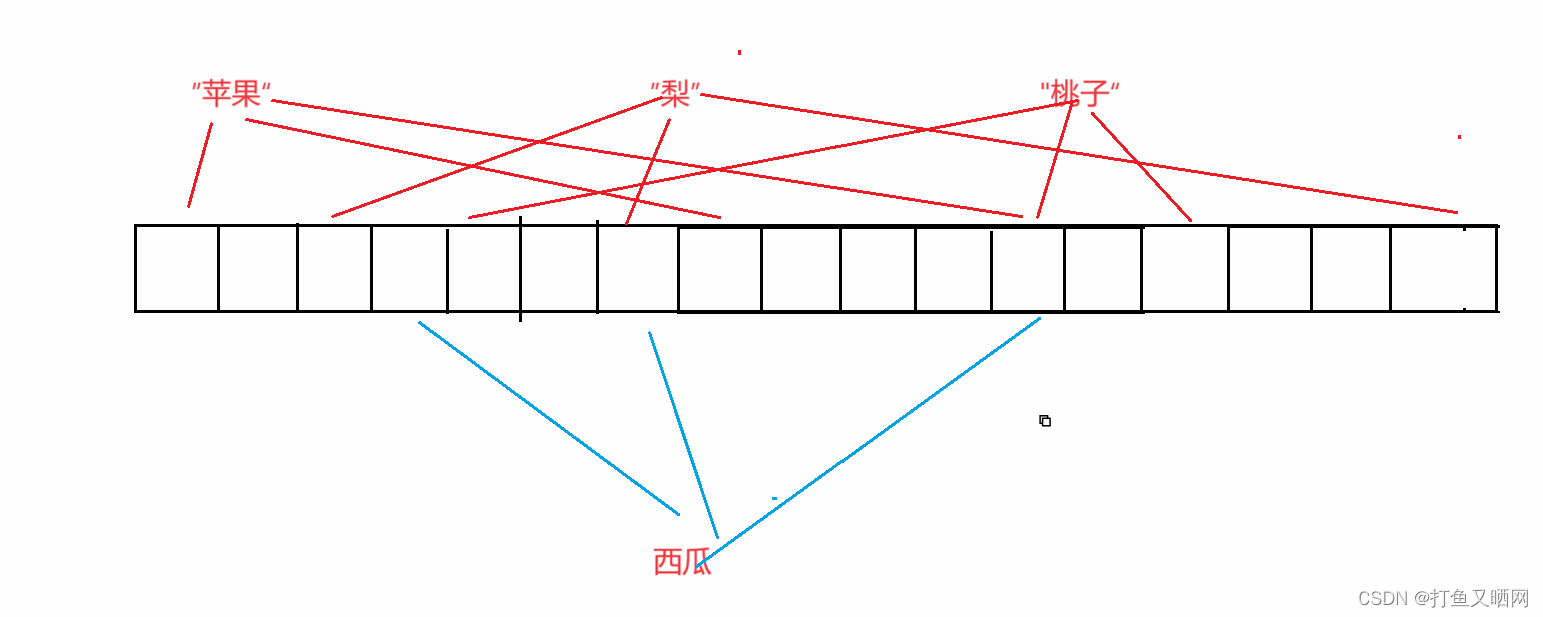 如图, 虽然西瓜有两个哈希函数映射的位置都被标记过了, 但是最左边那个映射的位置没有被标记过, 那么这样就可以看作西瓜没有出现过。 因为如果西瓜出现过。 这三个位置应该都被映射过, 但是现在这三个位置中有一个没有被映射过。 所以说明其他两个位置应该是和其他字符串发生了哈希冲突导致的, 西瓜就没有被映射过——现在, 这种没有被映射过的情况是一定的, 只要判断出一个字符串没有被映射过, 那么结果就是准确的。即:布隆过滤器的没有出现过是准确的。
如图, 虽然西瓜有两个哈希函数映射的位置都被标记过了, 但是最左边那个映射的位置没有被标记过, 那么这样就可以看作西瓜没有出现过。 因为如果西瓜出现过。 这三个位置应该都被映射过, 但是现在这三个位置中有一个没有被映射过。 所以说明其他两个位置应该是和其他字符串发生了哈希冲突导致的, 西瓜就没有被映射过——现在, 这种没有被映射过的情况是一定的, 只要判断出一个字符串没有被映射过, 那么结果就是准确的。即:布隆过滤器的没有出现过是准确的。
那么, 如果西瓜的映射位置不是上面那样了, 变成下图:
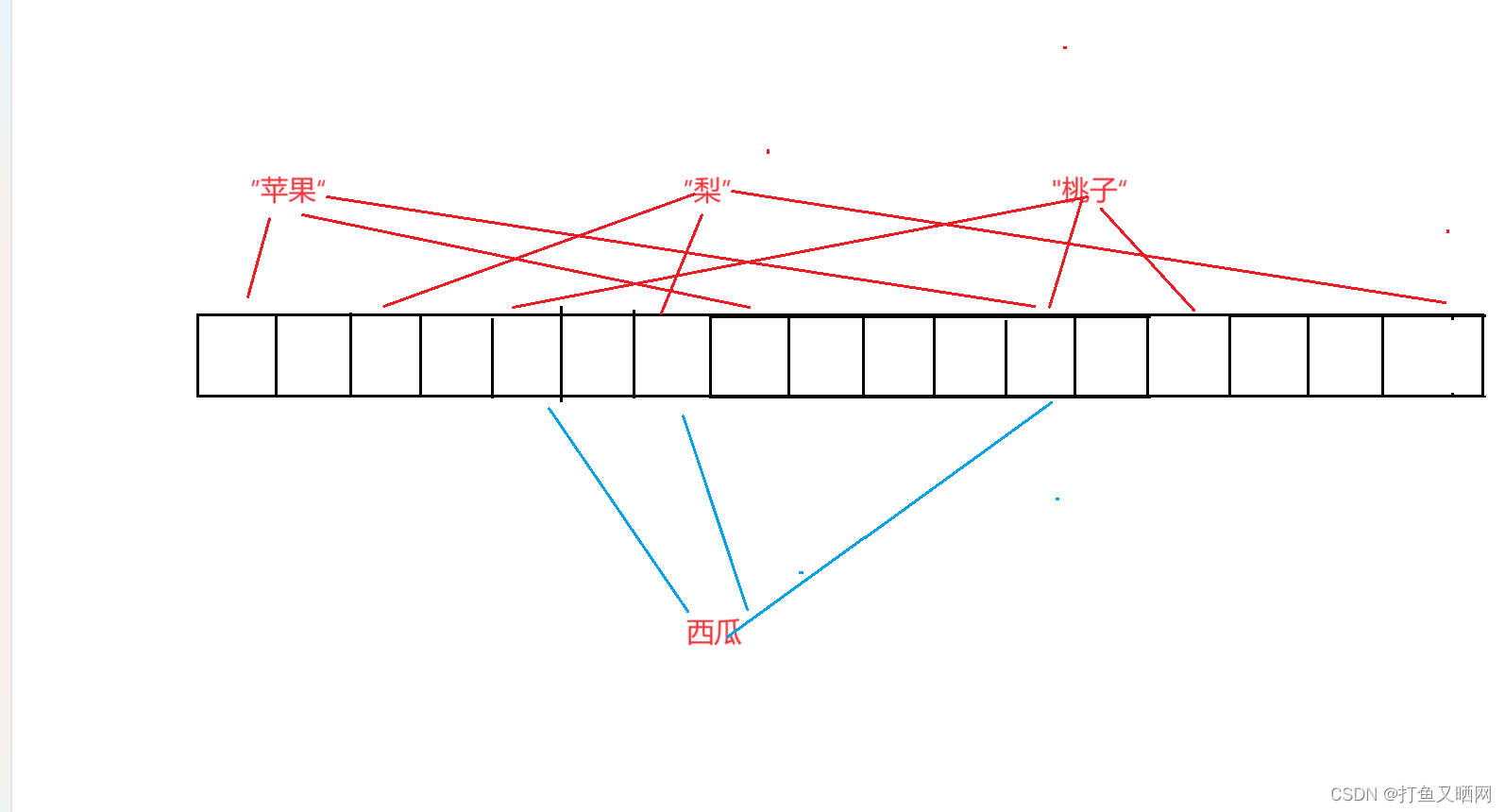
现在, 这三个位置都发生了哈希冲突, 返回的结果告诉我们西瓜出现过。 但是其实习惯并没有出现过, 这就说明如果判断一个字符串, 结果是出现过。 那么结果就是不准确的——现在, 这种被映射过的情况是不准确的。 即:布隆过滤器的出现过是不准确的。
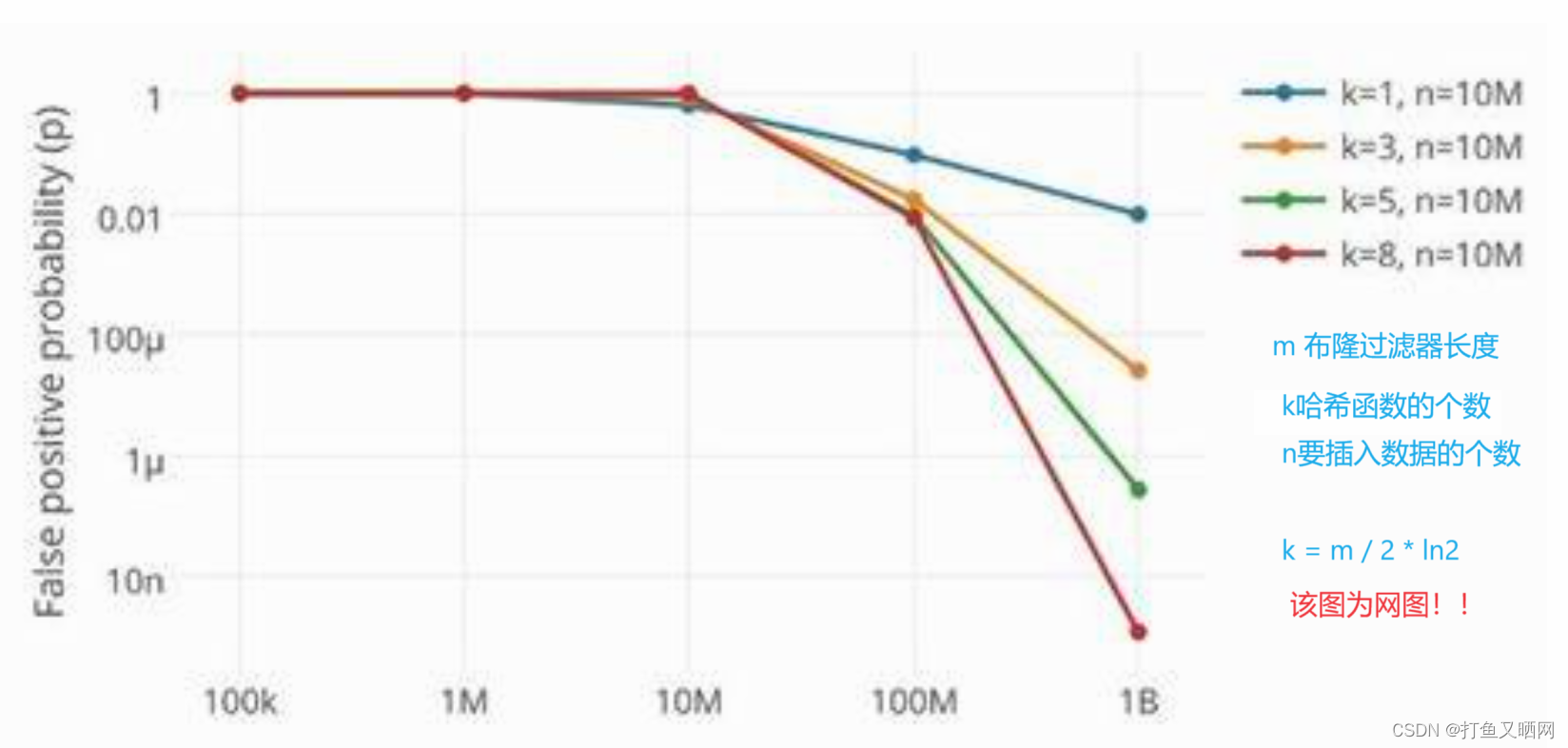
要提升布隆过滤器判断出现过的准确性, 就要增加哈希函数。 从图中我们可以看出来, 如果一个字符串映射的位置越多,那么就越难发生所有位置都冲突的情况。 但是, 另一个需要注意的是, 如果我们的字符串映射的位置太多了, 可能导致空间内大部分空间都被映射过。 那么哈希冲突的概率也会提升, 所以还是不行, 那么就要增加空间。 这就导致了一个问题——如果要提高布隆过滤器判断出现过的准确性, 就要增加哈希函数。 而增加哈希函数, 就要消耗更多的空间。
下面是布隆过滤器的准确性和哈希函数的个数的关系图:
布隆过滤器可以用来处理字符串, 以及其他类型。 只要使用相应的哈希函数即可。 这里使用三个哈希函数来封装布隆过滤器——三个哈希函数分别是:BKDR哈希, DJB哈希, AP哈希
//模版参数有五个, 一个要处理的数据个数, 一个要处理的数据类型, 三个哈希函数。 如图:
template<size_t n, class type = string, class HF1 = BKDRHash<type>, class HF2 = DJBHash<type>, class HF3 = APHash<type>>class BloomFilter {};//三个哈希函数(都可以在网上找到, 这里贴上方便友友使用)
三个哈希函数, 都要有一个关于字符串类型的特化形式。 因为我们使用布隆过滤器使用的最多的就是字符串类类型。 要实现字符串类型的特化就是使用模板的特化机制。如下代码:
//一般先创建一个模板类
template<class t>
class _class
{};
//然后在该模板类后面再跟一模板类,但是这个类里面没有参数, 类名后面跟参数。
template<>//没参数
class _class<string>//类名后跟string
{};
BKDR函数的定义是这样的
//第一个带参数的自行进行修改template<class type>struct BKDRHash{int operator()(const type& key) {return key;}};//字符串处理的特化template<>struct BKDRHash<string>{int operator()(const string& str) {int hash = 0;for (auto& e : str) {hash *= 31;hash += e;}return hash;}};DJB哈希的定义如下:
// //第一个带参数的自行进行修改template<class type>struct DJBHash {int operator()(const type& key) {return key;}};template<>struct DJBHash<string> {int operator()(const string& str){int hash = 0;for (auto& e : str) {hash += (hash << 5) + e;}hash = hash & ~(hash << 31);return hash;}};
APHash
template<class type>struct APHash {int operator()(const type& x) {return x;}};template<>struct APHash<string> {int operator()(const string& str) {int hash = 0;for (int i = 0; i < str.size(); i++) {if (i & 1 == 0){hash ^= ((hash << 7) ^ str[i] ^ (hash >> 3));}else{hash ^= ((hash << 11) ^ str[i] ^ (hash >> 5));}}return hash;}};
//布隆过滤器也是一个比特位,一个比特位进行映射。所以底层可以使用位图, 如下:
template<size_t n, class type = string, class HF1 = BKDRHash<type>, class HF2 = DJBHash<type>, class HF3 = APHash<type>>class BloomFilter {public://不需要构造函数private:bitset<n> _bits;};//布隆过滤器的接口——set(建立映射关系)、test(查看该数据是否存在, 存在不准确, 不存在准确)
template<size_t n, class type = string, class HF1 = BKDRHash<type>, class HF2 = DJBHash<type>, class HF3 = APHash<type>>class BloomFilter{public://不需要构造函数, 自动调用位图的构造函数//set就是利用三个哈希函数, 分别在位图上面映射一次。void set(type x){int hash1 = HF1()(x);int hash2 = HF2()(x);int hash3 = HF3()(x);_bits.set(hash1);_bits.set(hash2);_bits.set(hash3);}bool test(type x) {int hash1 = HF1()(x);int hash2 = HF2()(x);int hash3 = HF3()(x);//只有当三个位置都是映射过的, 这个数据才可能被映射过。但只要有一个没有映射过, 那么这个数据就一定没有映射过 if (_bits.test(hash1) && _bits.test(hash2) && _bits.test(hash3)) return true;return false;}private:bitset<n> _bits;};以上, 就是海量数据处理方面相关的知识点。