1 双臂机器人动力学模型
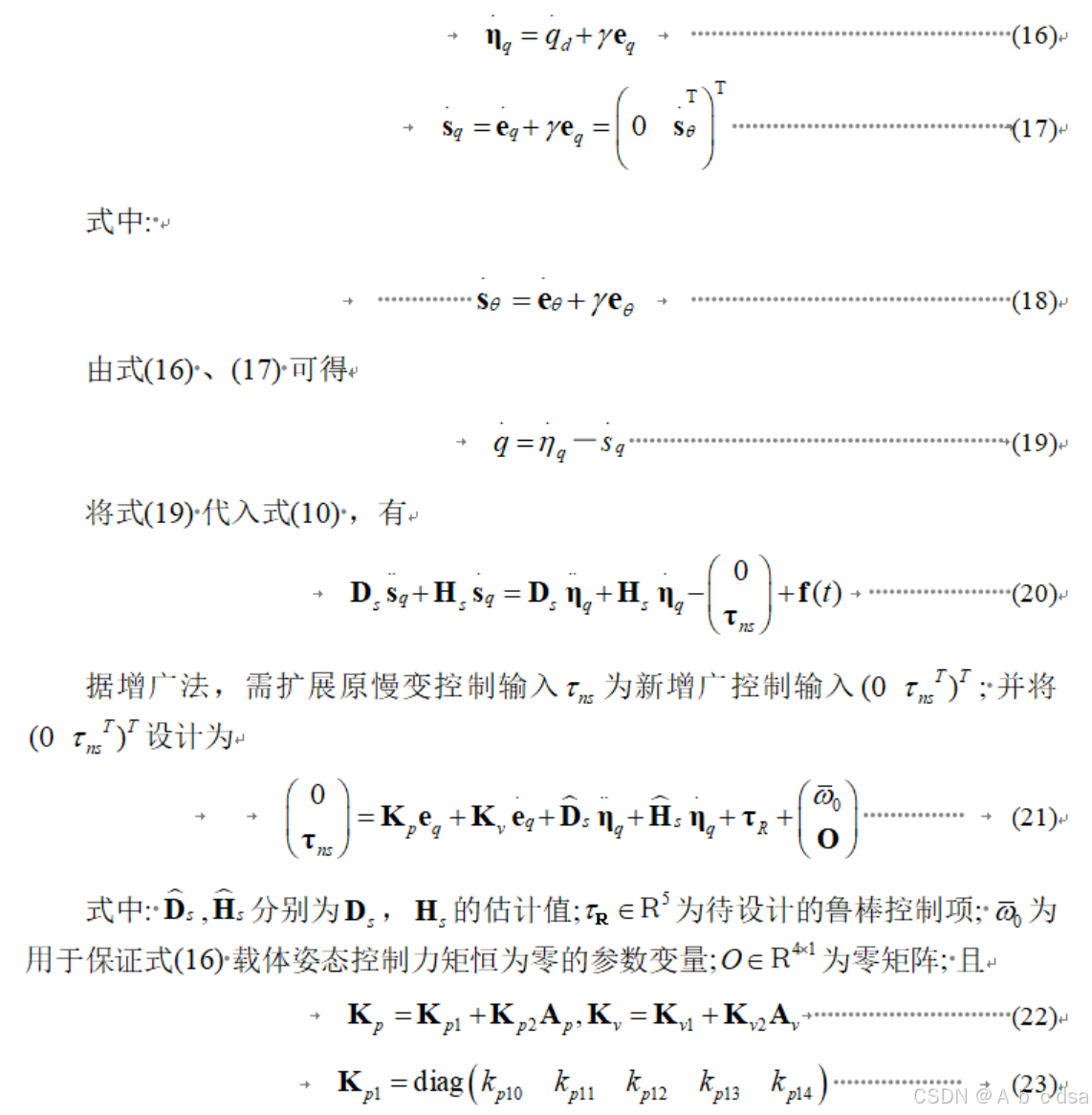
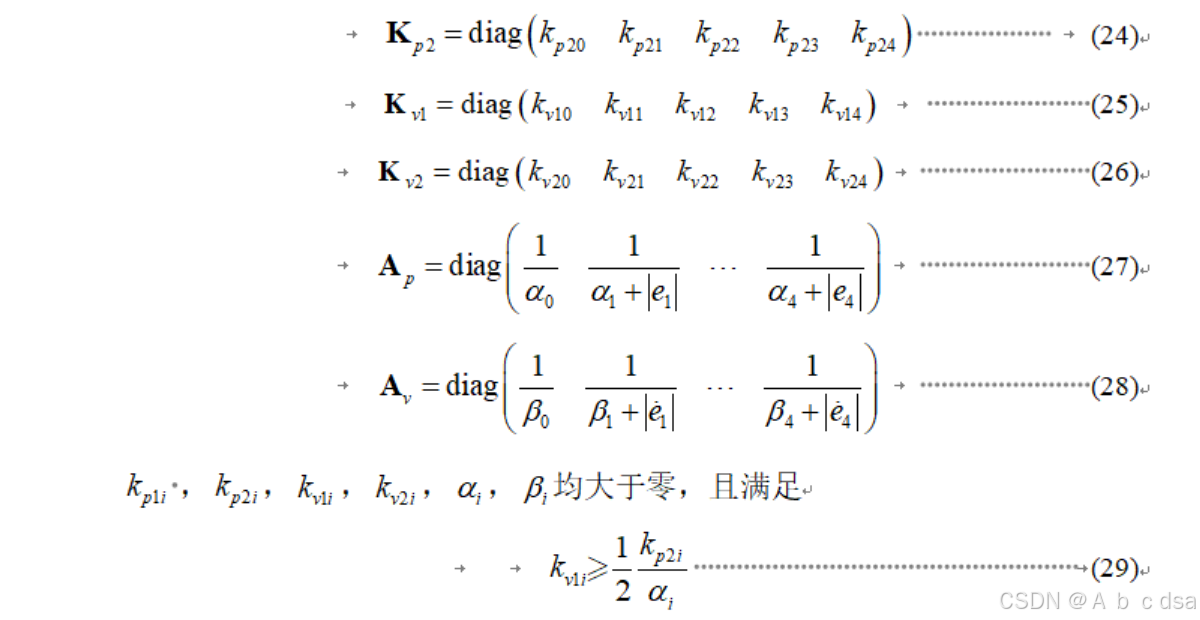
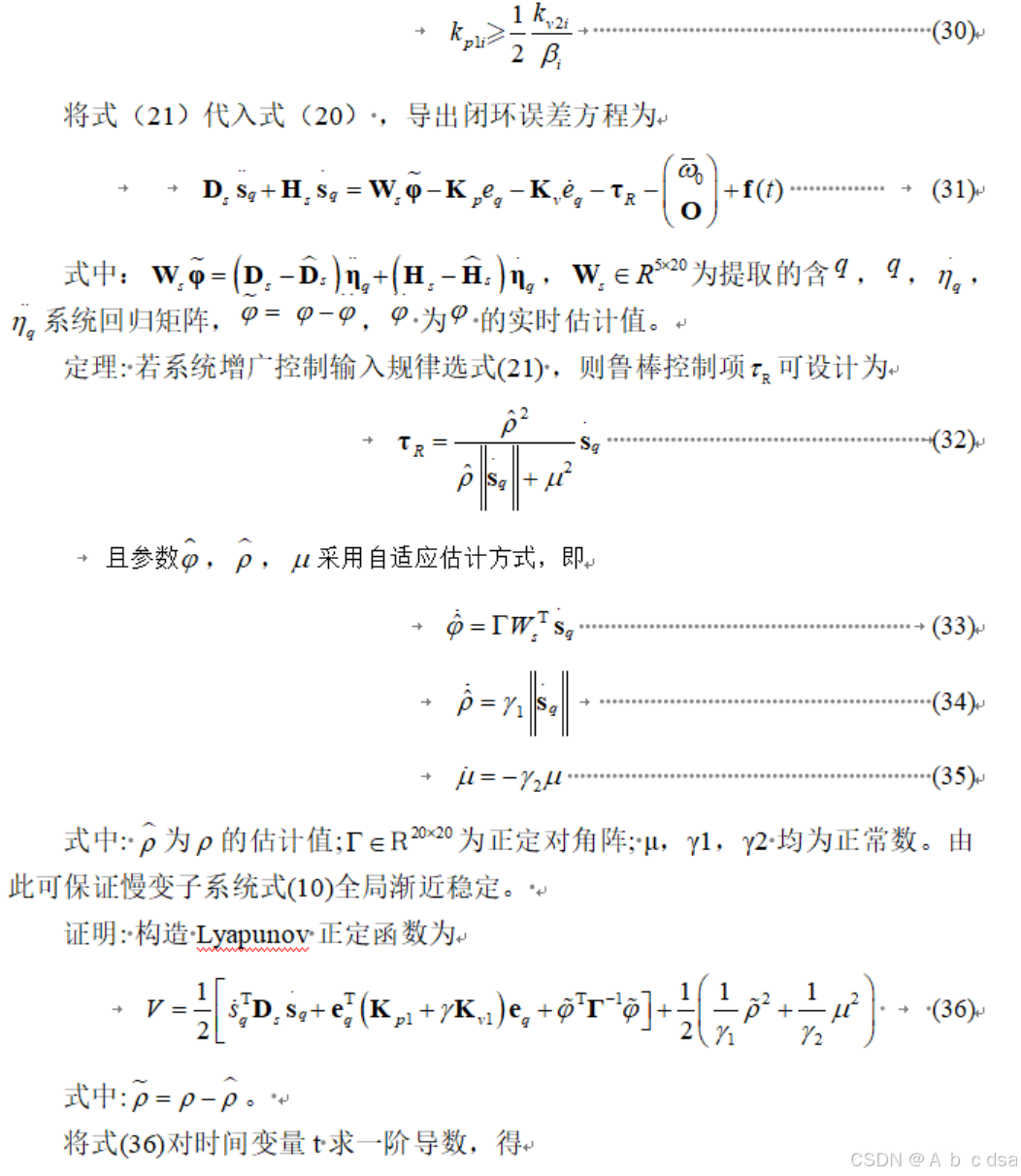
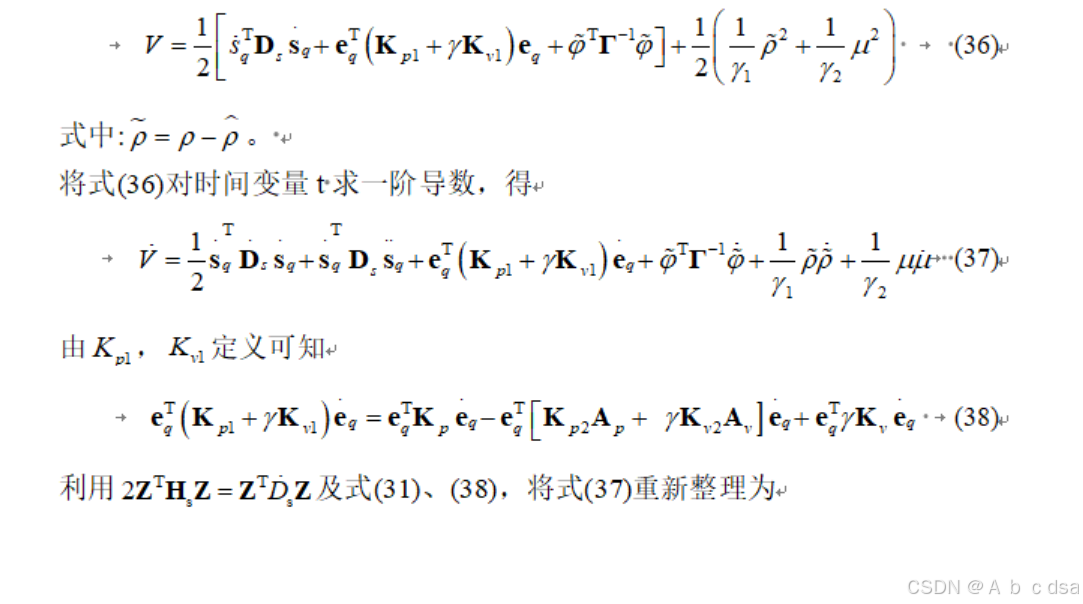
对于一个具有多个关节的机器人来说,机器人端动力学子方程及关节驱动电机端动力学子方程为:
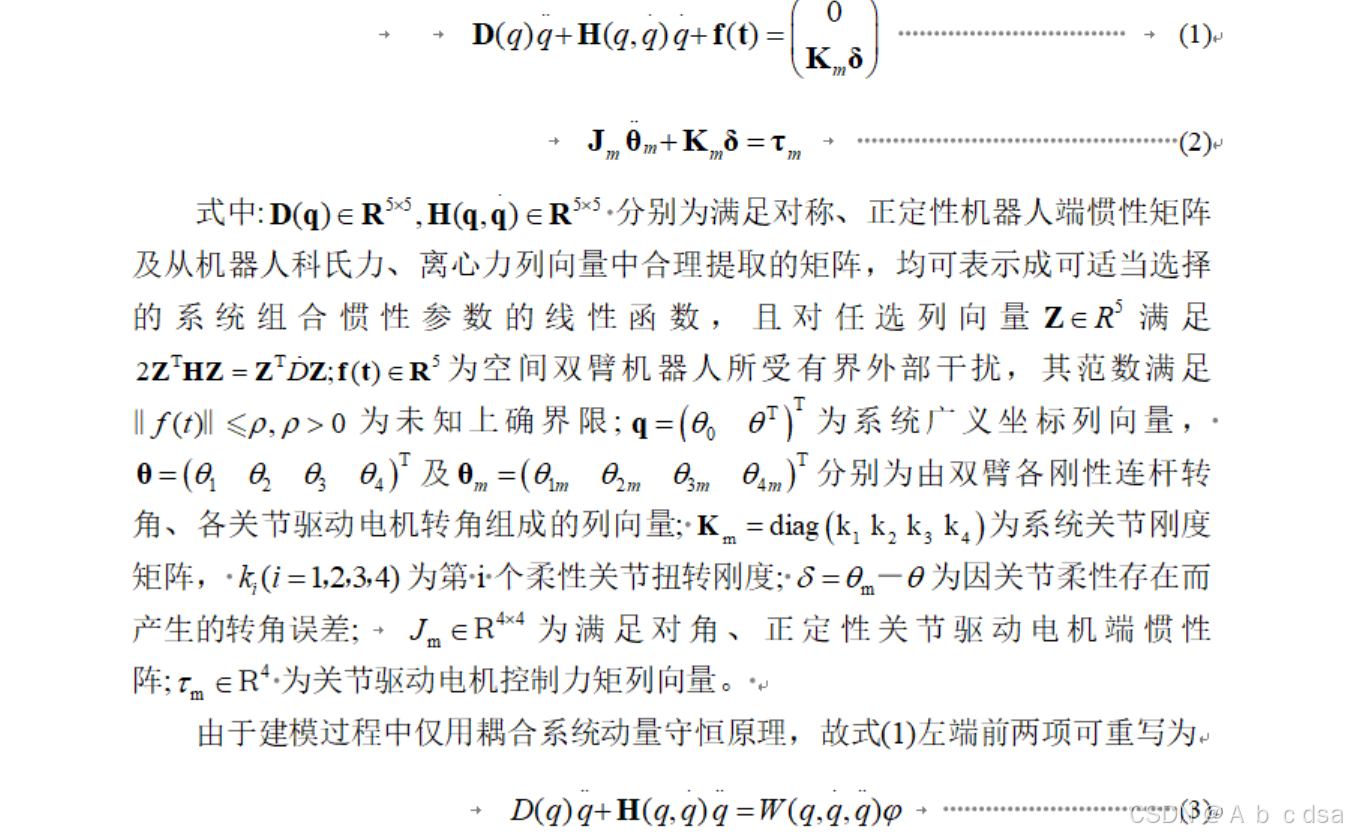
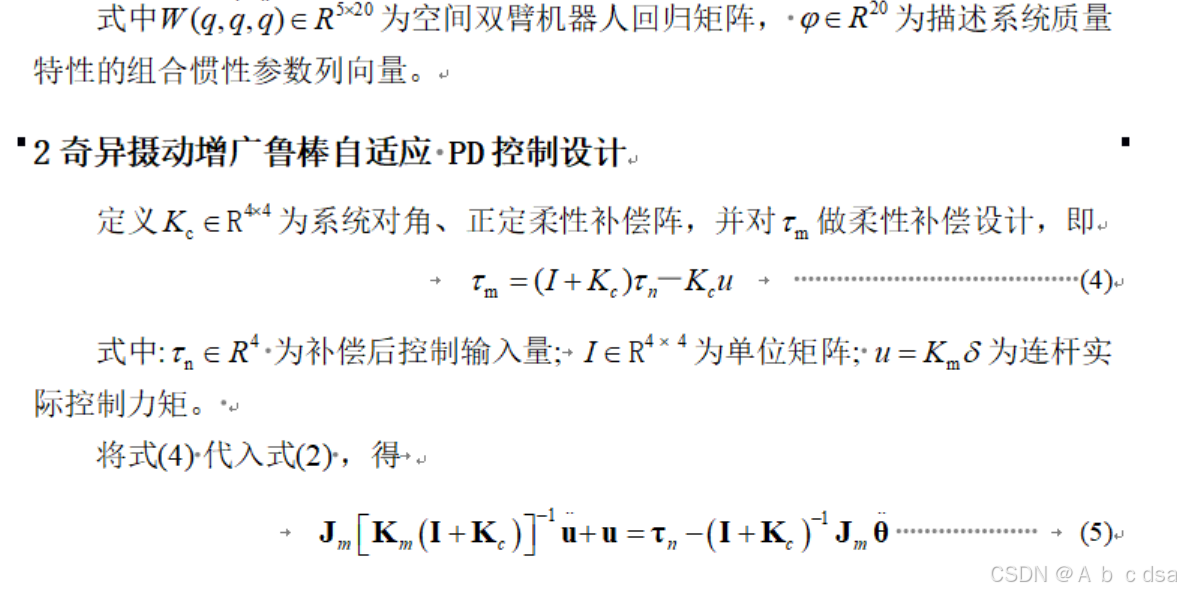
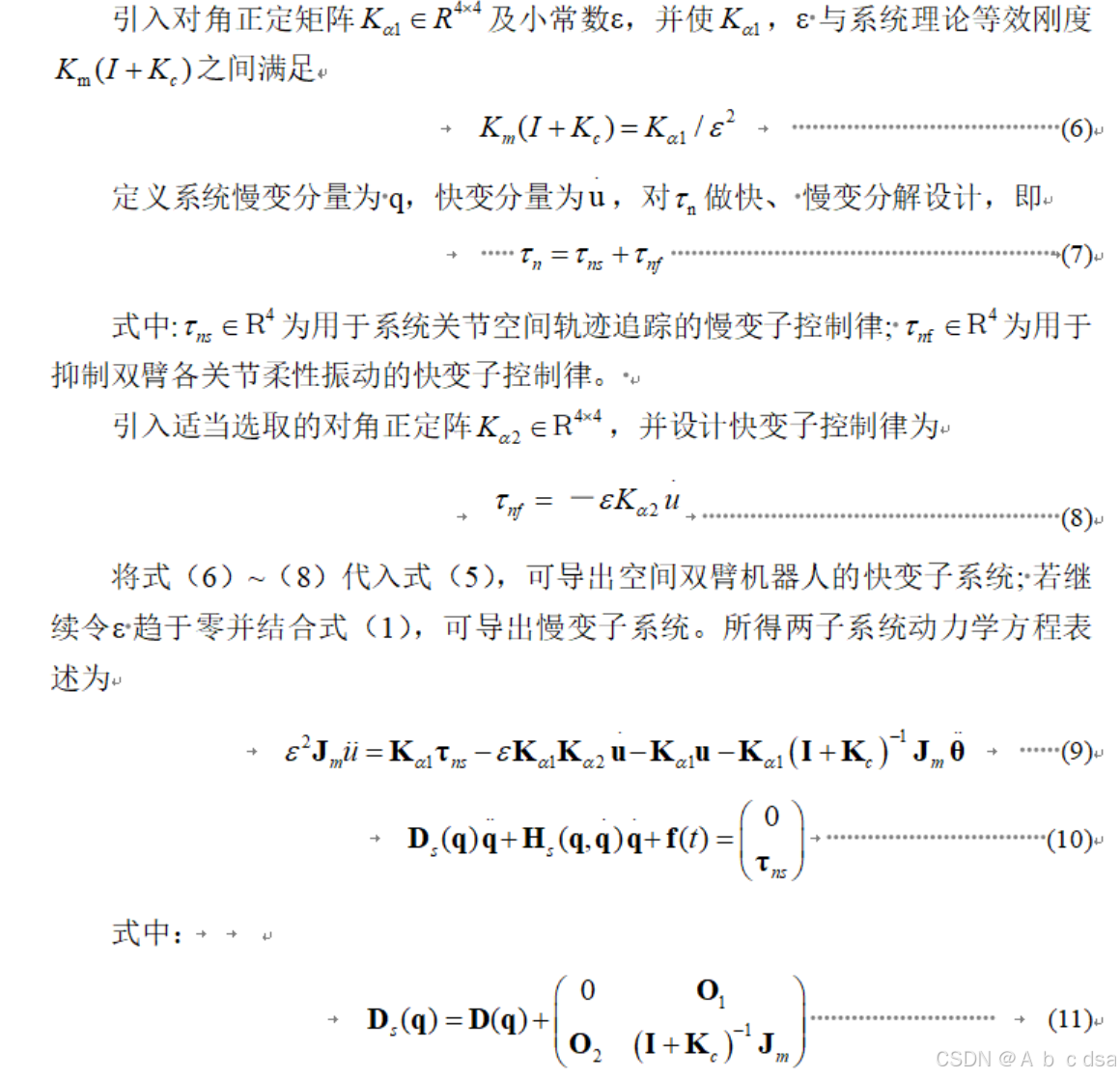
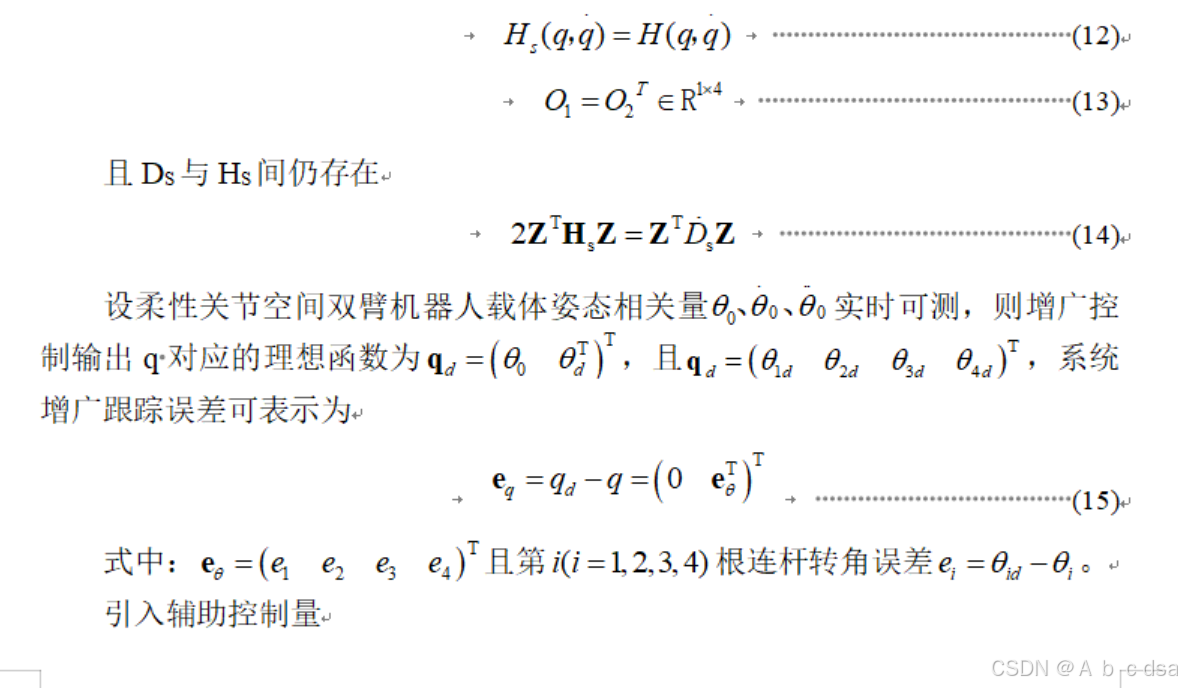


以上为推导过程,MATLAB程序已完成,若需要可找我。

1 双臂机器人动力学模型
对于一个具有多个关节的机器人来说,机器人端动力学子方程及关节驱动电机端动力学子方程为:
以上为推导过程,MATLAB程序已完成,若需要可找我。
版权声明:
本网仅为发布的内容提供存储空间,不对发表、转载的内容提供任何形式的保证。凡本网注明“来源:XXX网络”的作品,均转载自其它媒体,著作权归作者所有,商业转载请联系作者获得授权,非商业转载请注明出处。
我们尊重并感谢每一位作者,均已注明文章来源和作者。如因作品内容、版权或其它问题,请及时与我们联系,联系邮箱:809451989@qq.com,投稿邮箱:809451989@qq.com