文章目录
- 一.零极点对消在电机控制中的运用
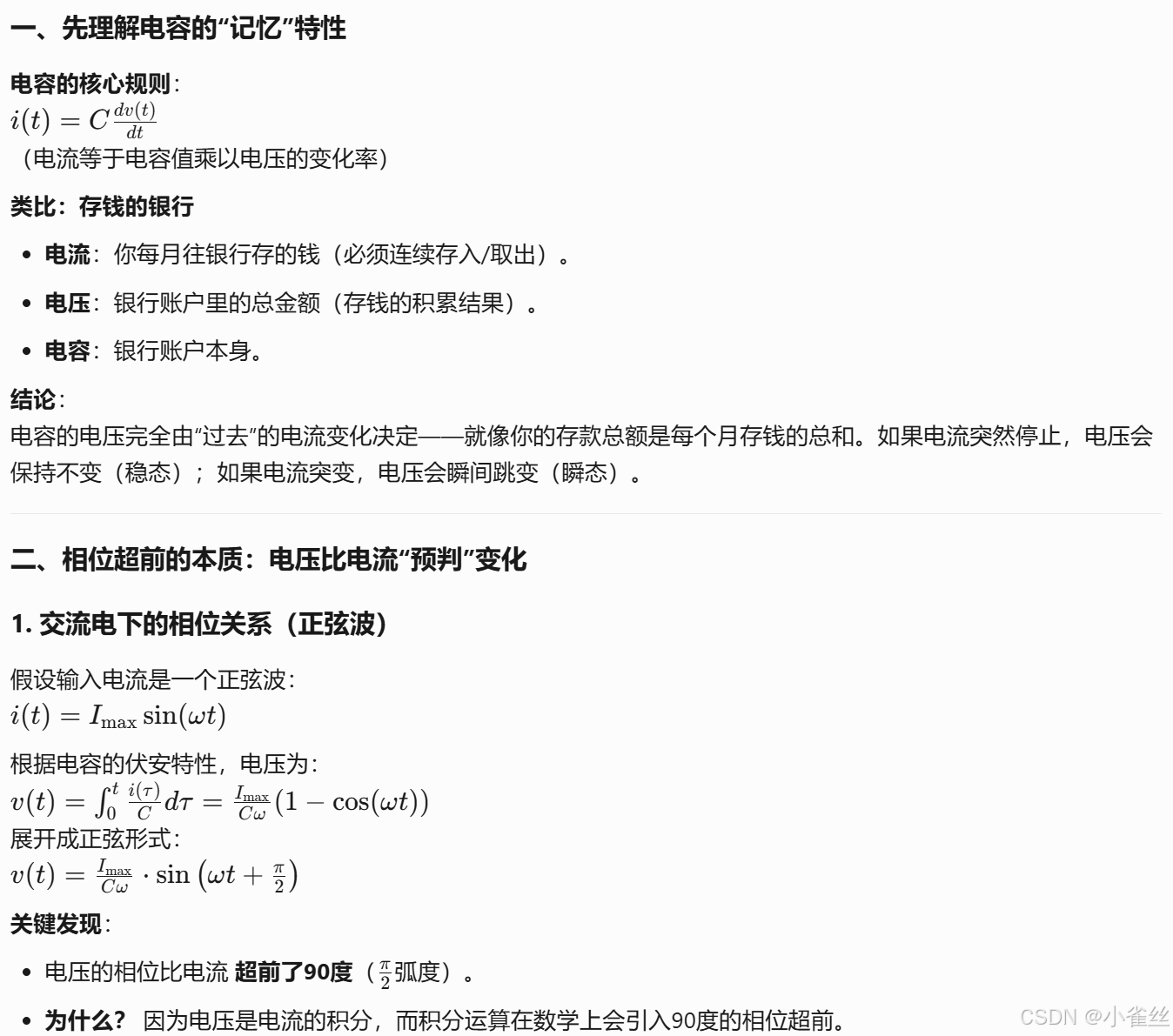
- 二.讲讲相位超前
- 三.ADC电流采样
- 四.电机转⼦传动系统中,如何实现⾼速旋转的同时保持稳定性与准确性?
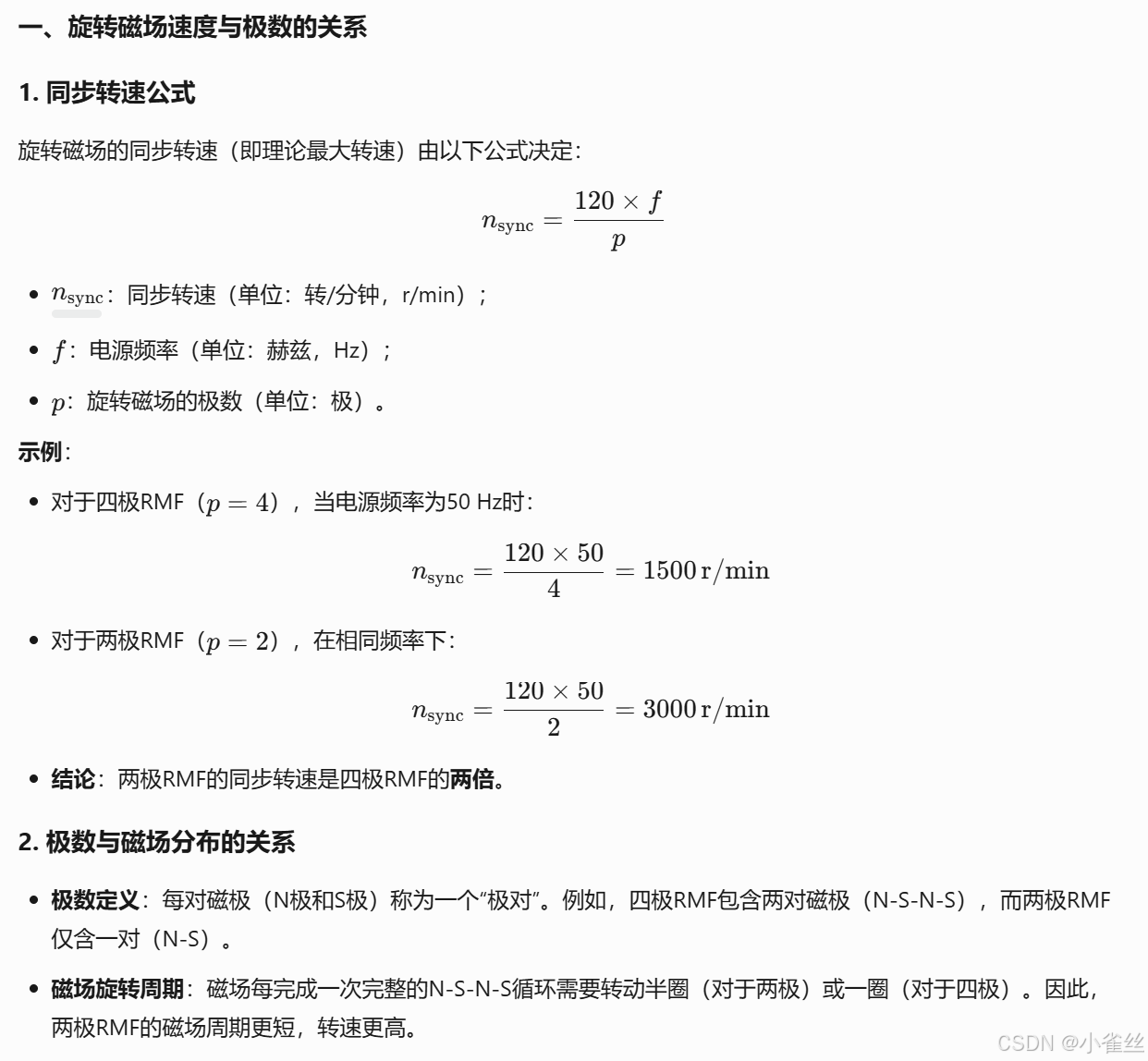
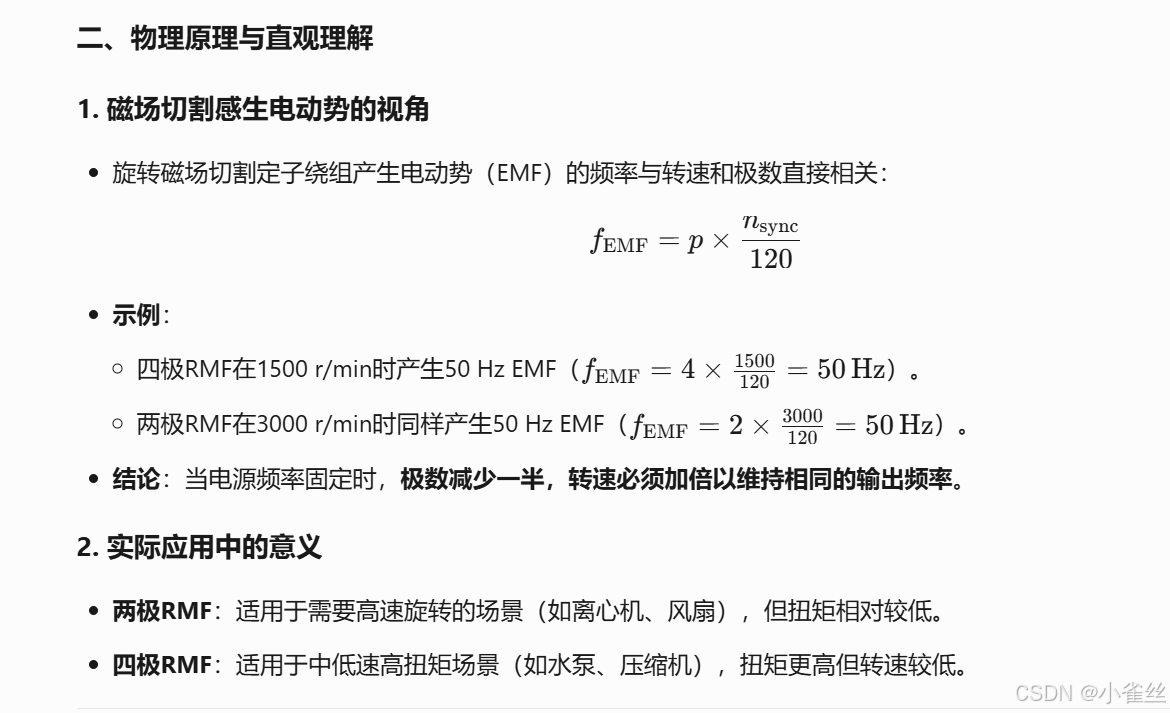
- 五.电机极数与转速的关系
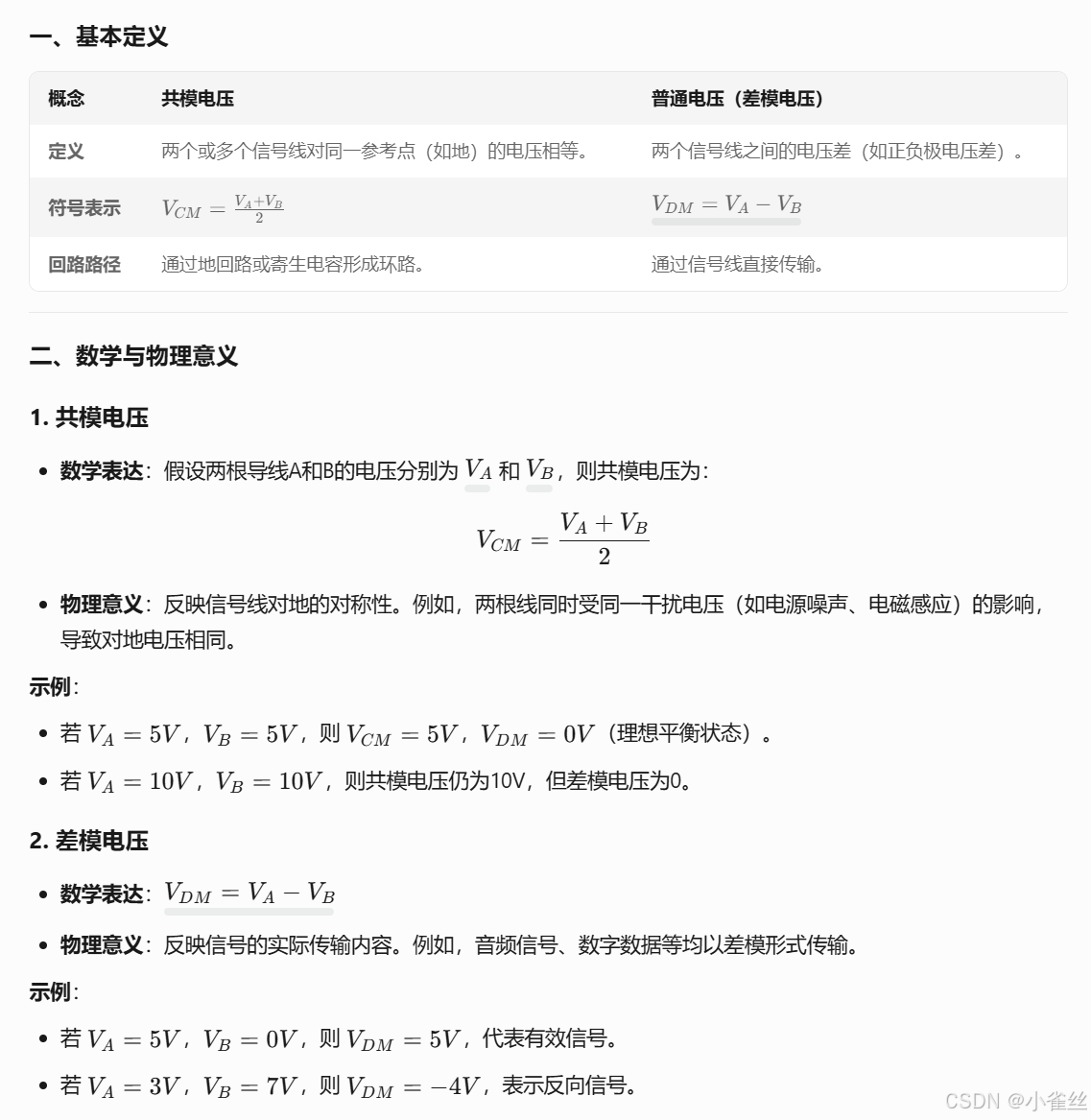
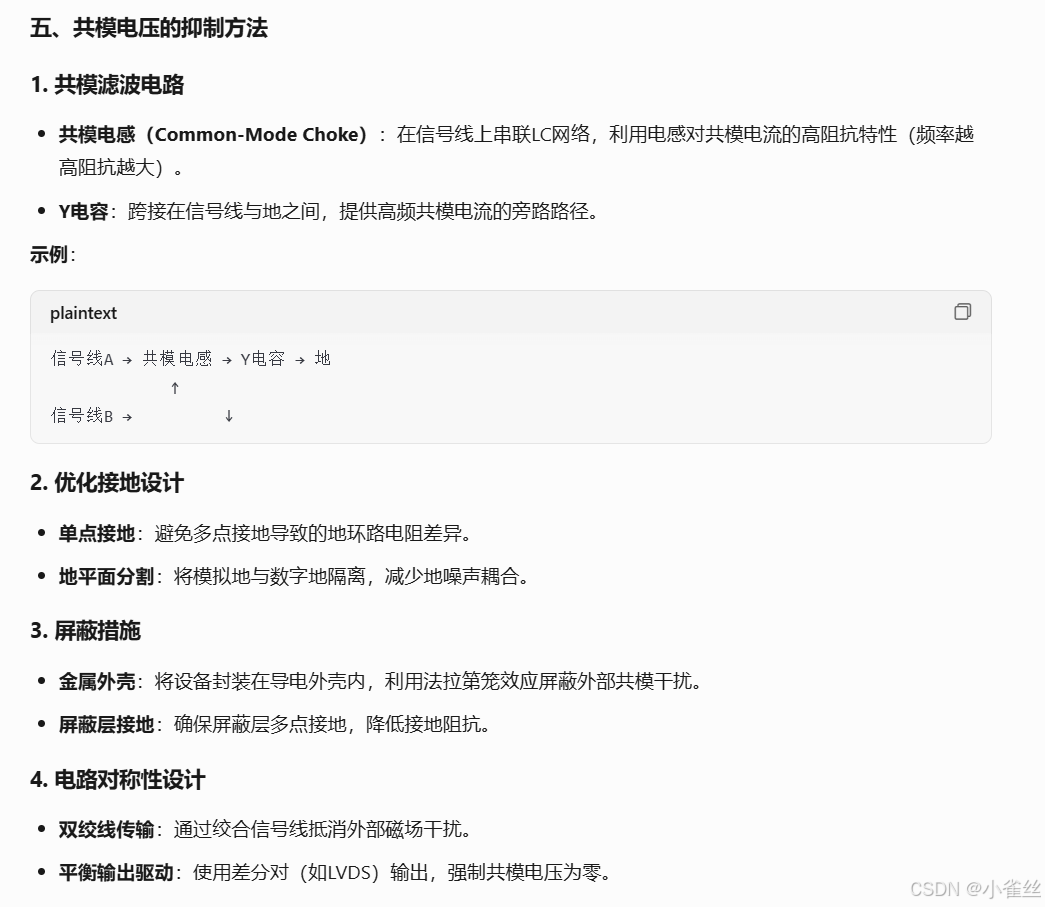
- 六.谈谈对共模电压的理解
- 七.电机集中式绕组与分布式绕组
- 八.高低压绕组匝数比悬殊的意义
一.零极点对消在电机控制中的运用
- 什么是零极点?——先打个「弹簧减震器」的比方
想象一辆汽车经过颠簸路面时,车身的震动可以用一个简单的弹簧减震系统来模拟:
弹簧(类似系统中的极点):决定车身震动的自然频率(比如硬弹簧高频震动,软弹簧低频震动)。
阻尼器(类似系统中的零点):决定震动衰减的速度(比如油液阻尼器能快速让车身停下,而空气阻力衰减慢)。
在控制理论中:
极点:系统内部固有的特性(如弹簧硬度、电机惯性),决定系统自然响应的速度和稳定性。
零点:外部因素或设计加入的特性(如传感器延迟、控制器补偿),影响系统如何“抵消”误差。
2. 为什么需要对消?——删掉「没用的弹簧和阻尼」
假设你的弹簧减震系统太复杂,比如同时存在:
一个硬弹簧(高频震荡)
一个软弹簧(低频震荡)
一个快阻尼器(迅速停止)
一个慢阻尼器(缓慢停止)
这时候系统行为会变得很奇怪:既有高频晃动,又有低频沉闷感,还可能因为阻尼冲突导致不稳定。
对消的作用就是删掉不必要的弹簧和阻尼:
如果硬弹簧和快阻尼器是“没用的”(比如设计时故意加的冗余),就把它们的影响从数学模型里去掉,简化成只剩软弹簧+慢阻尼器的简单系统。
简化后:系统更容易分析(比如工程师能快速算出车身多久停止晃动),也更容易设计控制器(比如调阻尼器参数)。
电机控制中运用
1. 模型简化与降阶
电机数学模型的高阶性:
电机(如永磁同步电机、感应电机)的动态方程通常包含电感、转子电阻、机械惯性等多物理场耦合,导致传递函数为高阶系统(如4阶或更高)。
对消作用:通过消除非主导零极点(如远离虚轴的极点或重复极点),将高阶模型简化为低阶近似模型,同时保留主导动态特性(如暂态响应速度和稳态精度)。
示例:
在永磁同步电机的电流环模型中,可能通过对消一对共轭复极点,将4阶系统简化为2阶,显著降低控制器设计的复杂度。
2. 提升控制器实时性
减少计算负担:
高阶模型的控制器(如PID或现代控制算法)需频繁计算高维状态空间矩阵,可能导致实时性不足。
对消作用:简化后的低阶模型可直接用于控制器设计,减少运算量,适用于嵌入式系统或高速电机控制。
示例:
在无人机电机控制中,简化后的模型可缩短电流环的采样周期,提升飞控系统的响应速度。
3. 改善稳定性与抗干扰性
消除非主导不稳定模态:
若原系统存在对稳定无贡献的右半平面极点(如由建模误差引入),可通过零极点对消将其移除,避免潜在振荡风险。
抑制高频噪声:
对消作用:在电机电流或转速信号中,高频噪声(如开关电源纹波)可能对应高频极点,对消后可降低噪声放大效应。
示例:
在变频器驱动的电机中,对消高频极点可减少PWM谐波对电流环的干扰。
4. 优化现代控制算法
状态空间模型简化:
在LQG(线性二次高斯控制)或滑模控制中,原始系统可能具有多个状态变量。
对消作用:通过构造可观测/可控标准型,对消冗余状态变量,降低状态空间维度,减少算法计算量和存储需求。
示例:
在电动汽车驱动电机的控制中,简化后的状态模型可更快完成参数优化,提升能量效率。
5. 频率响应匹配
调整控制带宽:
对消作用:通过移除非主导零极点,可调整系统开环频率响应的斜率(如-20dB/dec),使其更接近理想控制器(如一阶系统)。
示例:
在电机转速控制中,对消后系统带宽可扩展至更高频率,提升抗负载扰动的能力。
6. 典型应用案例
永磁同步电机(PMSM)FOC控制:
模型简化:将三相交流模型转换为旋转坐标系下的二维模型后,进一步对消冗余极点,设计更高效的电流/转速控制器。
伺服电机PID tuning:
稳定性优化:对消因电机参数摄动(如温度变化)引入的敏感极点,提高PID参数的鲁棒性。
步进电机细分驱动:
抑制高频振荡:对消细分算法中产生的高频噪声极点,改善步进平滑性。
二.讲讲相位超前
相位超前是控制理论、信号处理和电路分析中的一个重要概念,指系统或信号在特定频率下的输出相位相对于输入信号的相位提前现象。其核心是通过调整系统参数(如引入零点或修改极点位置)来优化动态响应特性。
为什么需要相位超前?
比如你开车时急刹车:
没有相位超前:刹车踏板踩下去,车先减速,然后才完全停下来(反应慢,可能撞到前面)。
有相位超前:刹车系统提前“猜到”你要刹车,提前减少动力(比如预测性驾驶辅助),车更快减速,更安全。
如何实现相位超前?
在控制系统中,可以通过添加“提前反应”装置来实现,比如:
微分控制器:像雷达一样,提前感知速度变化(微分运算),提前刹车。
电路中的电容:在RC电路中,电容会“记住”电流的变化,提前产生电压(相位超前)。
相位超前的代价
增益降低:就像你提前刹车,但可能用力过猛,导致停车距离变长(系统增益下降)。
高频敏感:太关注未来的变化,可能会被高频噪音干扰(比如急刹车时误判路边的小石子)。
三.ADC电流采样
双重矫正:零飘消除与系数矫正
1. 零飘消除(Zero Drift Correction)
问题:
ADC芯片的传感器或电路在长时间工作后,可能因温度变化、老化等因素产生固定的偏移量(类似体温计每天早晨自动“升0.5℃”)。
解决:
硬件校准:在出厂时测量实际零点值(无电流时的输出),存入芯片内部寄存器。
软件修正:每次采样后,用存储的零点值减去当前读数。
类比:每天早上校准体重秤的“零点”(无人体时显示50kg),避免因秤体老化导致误差。
2. 系数矫正(Gain Calibration)
问题:
传感器输出电压可能与实际电流不成线性比例(如电流1A时输出1V,但电流2A时可能输出1.8V)。
解决:
硬件校准:施加已知电流,记录对应电压,生成校准系数(如系数=电压/电流)。
软件修正:用校准系数乘以原始数值,得到真实电流值。
类比:用不同尺寸的杯子装水,通过标记杯口位置(校准系数)确保“1升”标识的准确性。
三、9路A/D输出与内存拷贝模块
1. 为什么需要9路输出?
三相系统扩展:
每相电流可能需要采样多个点(如正弦波的每个峰值、谷值)。
或系统需要同时监测三相电压+三相电流(共6路),外加其他信号(如温度、转速),总计9路。
类比:一家超市有9个收银台,每个收银台处理一种商品(电流/电压)的“结账”(数字化)。
2. 内存拷贝模块的作用
数据缓冲:
ADC的采样速度可能远高于后续处理单元的处理速度(如每秒采样1000次,但处理器每秒只能处理100次)。
→ 需先将数据暂存到内存中,避免“拥堵”。
并行处理:
不同任务可能需要同一组数据(如同时计算三相功率和电流畸变率)。
→ 通过内存拷贝,多个处理单元可同时访问原始数据。
类比:快递分拣中心:快递员(ADC)将包裹(数据)分拣到不同货架(内存地址),多个分拣员(处理单元)可同时从货架取件处理。
3. “单独的数据元素复制”是什么意思?
数据粒度:
ADC可能以16位二进制数表示一个电流值(如0x1234)。
→ 每个“数据元素”指一个完整的16位数值,而非单个比特。
复制目的:
冗余备份:防止原始数据被覆盖后丢失。
同步处理:一个处理单元修改数据时,其他单元仍可使用原始值。
类比:图书馆复印书籍:读者(处理单元)可以同时借阅多本复印件(内存拷贝),而不会影响其他人的借阅。
四、完整数据处理流程图
plaintext
三相电流信号 → ADC采样 → 零飘消除 → 系数矫正 → 内存拷贝(9路) → 后续处理(如PID控制、显示)
关键节点说明:
ADC采样:将模拟电流转换为数字值(如0x5678)。
零飘消除:减去传感器偏移量(如0x5678 - 0x1000 = 0x4678)。
系数矫正:乘以校准系数(如0x4678 * 0.85 = 0x3976)。
内存拷贝:将矫正后的数据复制到9个不同地址(如RAM[0]到RAM[8])。
后续处理:用矫正后的数据计算功率、频率或触发保护机制。
五、生活化类比:厨房秤的智能化升级
ADC采样:电子秤的传感器将物体重量转换为电压信号。
零飘消除:每天开机时自动“归零”(减去传感器自重)。
系数矫正:校准不同材质(如水、面粉)的密度,确保“1kg”标识准确。
多路输出:同时监测食材重量、温度、湿度(9路数据)。
内存拷贝:将数据备份到手机APP,方便远程查看历史记录。
六、常见疑问解答
Q1:为什么不直接用原始ADC值,而要矫正?
A:就像用未校准的体温计量体温,可能因传感器老化多测0.5℃,导致误判发烧!
Q2:9路内存拷贝是否浪费资源?
A:类比超市收银台:虽然多开几个收银台会占用空间,但能大幅缩短排队时间(提高效率)。
Q3:零飘和系数漂移有什么区别?
A:
零飘:固定偏移量(如每天+0.5℃)。
系数漂移:比例关系变化(如1kg显示为1.2kg,之后可能变为1.5kg)。
四.电机转⼦传动系统中,如何实现⾼速旋转的同时保持稳定性与准确性?
在电机转⼦传动系统中,实现⾼速旋转并保持稳定性与准确性⾄关重要。以下是实施措施和原理:
- 使⽤精密轴承:采⽤⾼质量、⾼速度额定值的轴承,减少摩擦⼒和振动,确保转⼦稳固旋转。
- 平衡校正:通过精确的平衡校正措施,减少不平衡质量和振动幅度,提⾼系统运⾏稳定性。
- 磁轴承技术:利⽤磁浮⼒来⽀撑转⼦,避免与传统轴承接触,减少摩擦和磨损,提⾼转⼦旋转准
确性。 - 动平衡技术:通过动态平衡测试和调整,减少转⼦不平衡量,确保⾼速旋转时稳定性和准确性。
- 系统监控与反馈控制:引⼊传感器监测转⼦运⾏状态,通过反馈控制系统调整参数,保持系统在
⾼速旋转时的稳定性。 以上措施结合运⽤,可以在⾼速旋转的同时保持电机转⼦传动系统的稳定
性与准确性。
先搞懂什么是「动平衡」?
类比:骑自行车
不平衡的状态:如果自行车的轮子没装好,当你用力踩踏板时,车头会左右剧烈摇晃,甚至摔倒——这就是不平衡带来的问题。
动平衡的作用:给车轮加上配重块(类似动平衡技术),让车子在骑行时保持稳定,不会自己乱晃。
核心目标
动平衡技术的本质是:通过实时检测和调整,让高速旋转的转子(比如电机转轴)上的力分布均匀,避免因质量偏心引起的振动和磨损。
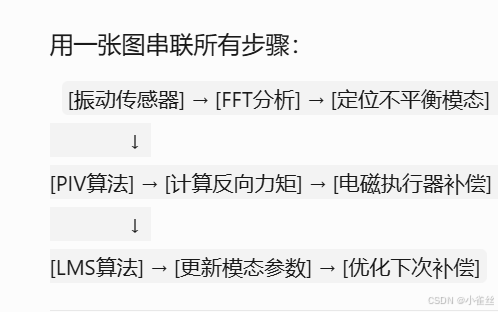
动态响应实时校正的三大核心步骤
1. 频响分析法:找出「哪里不平衡」
什么是振动频率?
振动就像唱歌时的声调高低,频率就是振动的「音高」。例如,转子每秒转100圈,它的基频就是100Hz(1Hz=每秒1圈)。
为什么要分析1/2~3/4倍频?
原因:当转子不平衡时,不仅会在基频(100Hz)处振动,还会在更高频率(如200Hz、300Hz)处出现谐波振动。
类比:就像敲鼓时,用力敲击中心点(基频),鼓面边缘也会跟着振动(谐波)。
作用:通过FFT变换(一种数学工具),我们可以从复杂的振动信号中分离出这些频率成分,找到哪个位置的质量偏心导致了特定频率的振动。
关键操作:
用激光多普勒测振仪或加速度传感器采集振动数据。
对数据做FFT分析,画出振动频谱图(类似音乐频谱图)。
在1/2~3/4倍频处找到最大的振动峰,定位不平衡的位置。
2. 前馈补偿控制:「主动纠偏」的魔法
问题:知道了哪里不平衡,怎么调整?
不能停机重新配重(否则高速设备就瘫痪了),必须实时动态补偿!
类比:自动驾驶汽车的纠偏
比如汽车左前轮不平,传感器检测到后,会立即给右后轮施加反向力矩,让车保持直行。
动平衡技术也是类似:检测到振动后,计算需要施加多大的反向力矩,并通过电磁执行器瞬间调整。
具体步骤:
采集信号:振动传感器每秒采集10,000次数据(采样率≥10kHz)。
计算反向力矩:用PIV算法(类似导航中的路径规划算法)算出需要多大力量和方向来抵消振动。
举个栗子:如果左边振动大,就给右边施加一个向左的力矩。
驱动执行器:电磁执行器(类似微型起重机)以毫秒级速度(推力≥50N,行程±2mm)移动配重块,实时抵消振动。
关键点:
实时性:必须在振动发生前0.1秒内完成调整(否则来不及)。
闭环控制:调整后会再次检测振动,不断迭代优化(类似PID调温)。
3. 模态参数辨识:「预测未来」的智能模型
问题:每次调整都依赖历史数据?不够!需要提前知道转子在不同状态下的「性格」!
模态参数:就像人的身高、体重、肌肉量(刚度、阻尼、质量),决定了转子在受力时的振动特性。
目标:通过在线学习,实时更新转子的「身体参数」,让补偿更精准。
类比:健身房里的体脂秤
初始状态:你不知道自己的肌肉量和脂肪量(模态参数未知)。
测量过程:通过多次称量(采集数据)和算法分析,逐渐建立你的身体模型。
应用:下次再称重时,能更准确地预测你的健康状况(振动趋势)。
LMS算法:
全称:最小均方误差算法(Least Mean Square)。
原理:像学走路一样,通过不断试错调整参数,让预测结果和实际结果的误差越来越小。
具体操作:
假设初始刚度矩阵为G₀,阻尼矩阵为D₀。
根据实际振动数据,计算误差e = 实际振动 - 预测振动。
更新参数:G = G₀ + ηe,D = D₀ + ηe(η是学习率,类似学步的勇气值)。
每100ms重复一次,直到参数稳定。
五.电机极数与转速的关系
六.谈谈对共模电压的理解

总结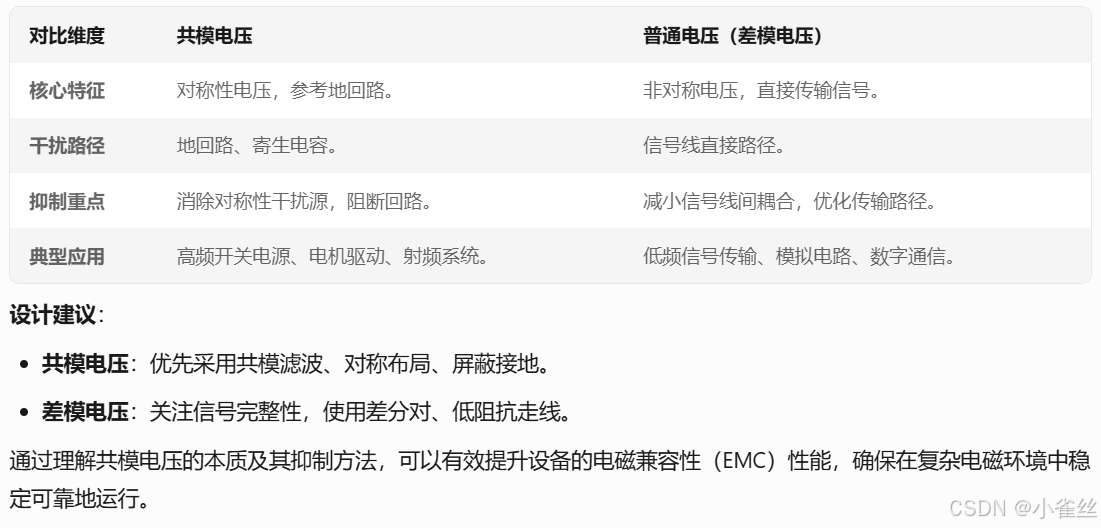
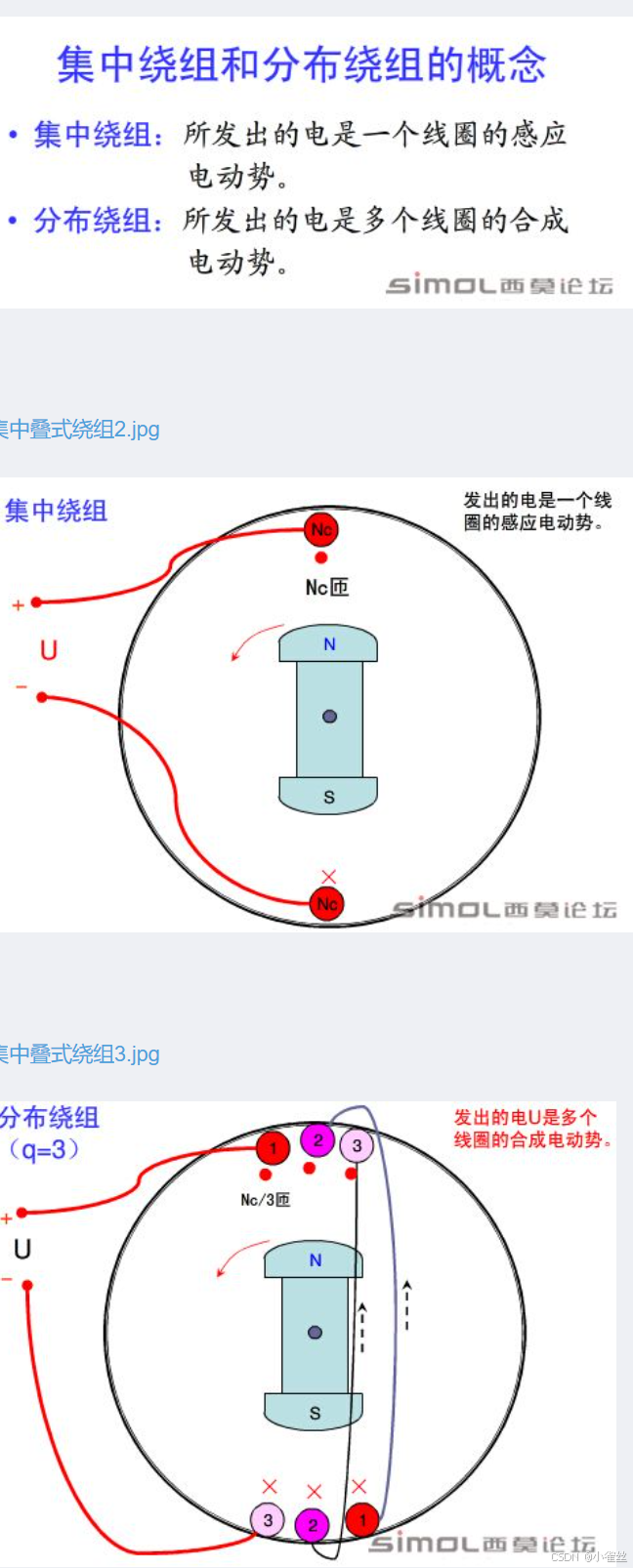
七.电机集中式绕组与分布式绕组

八.高低压绕组匝数比悬殊的意义
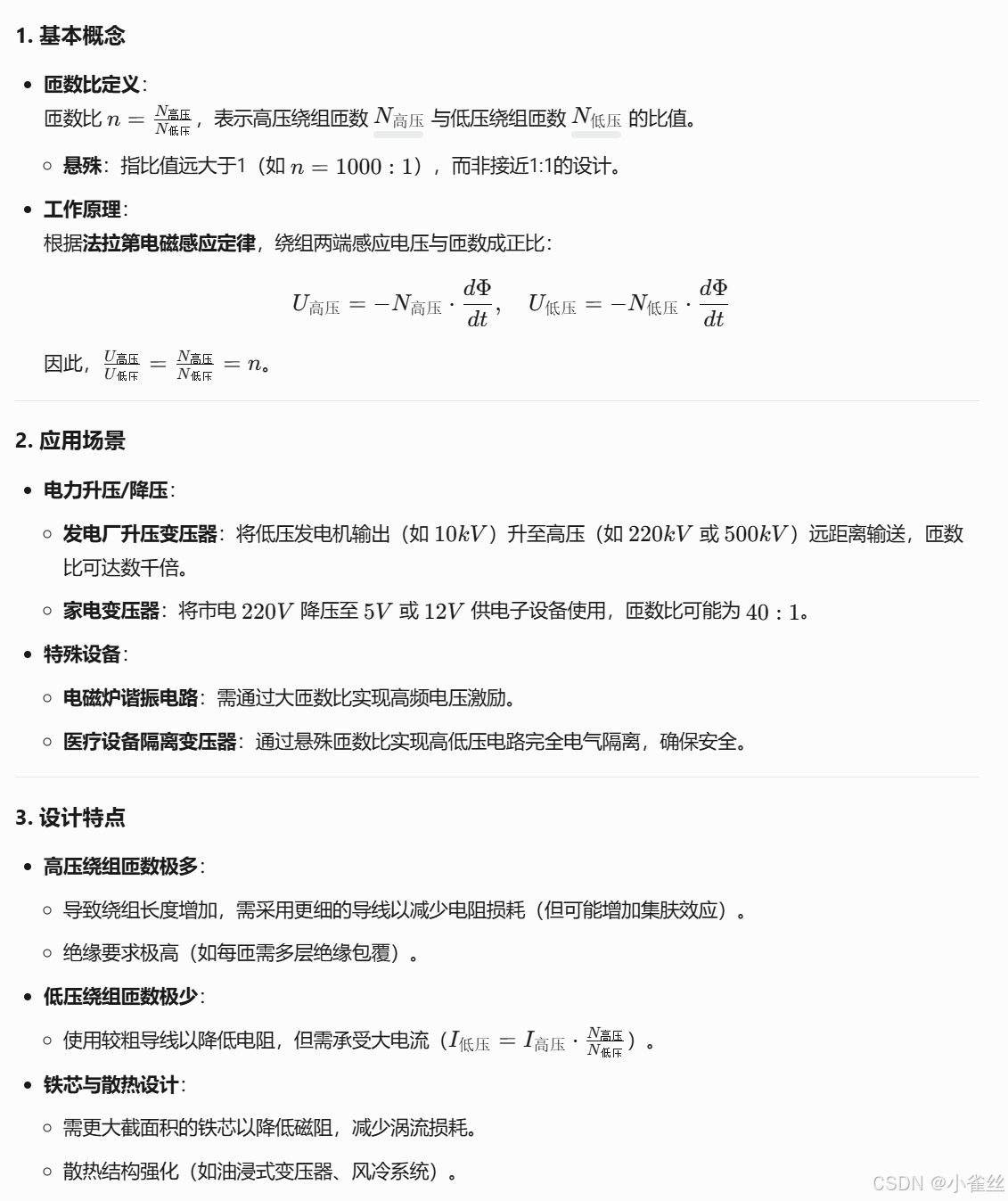

总结
高低压绕组匝数比悬殊是实现大电压转换的关键设计手段,广泛应用于电力系统、工业设备和电子装置中。其核心是通过匝数差异直接调控电压比例,但需平衡绝缘、散热、漏磁等工程挑战。 理解这一概念有助于分析电气设备的设计原理及优化方案。