研究背景
- 研究问题 :这篇文章要解决的问题是如何在杂乱的场景中高效地进行 6自由度(6-Dof)抓取检测。现有的方法在处理复杂场景时效率低下,且难以生成高质量的抓取配置。
- 研究难点 :该问题的研究难点包括:如何在全局语义信息的指导下,有效地聚合局部点云以生成抓取区域;如何在局部区域内精确估计空间旋转,以提高抓取的准确性和多样性。
- 相关工作 :该问题的研究相关工作包括基于模型的方法和无模型的方法。基于模型的方法通过对象姿态估计和预定义的抓取数据库来生成抓取配置,而无模型方法则将问题转化为图像中的抓取矩形检测。近年来,6-Dof 抓取因其灵活性而受到广泛关注,但现有的方法在实时性能和抓取质量方面仍有改进空间。
研究方法
这篇论文提出了一种新的高效 6-Dof 抓取检测框架,用于解决杂乱场景中的抓取检测问题。具体来说,
-
全局到局部,语义到点的框架 :该框架首先通过全局语义信息指导局部点云的聚合,然后在局部区域内进行抓取姿态的生成。具体步骤包括:
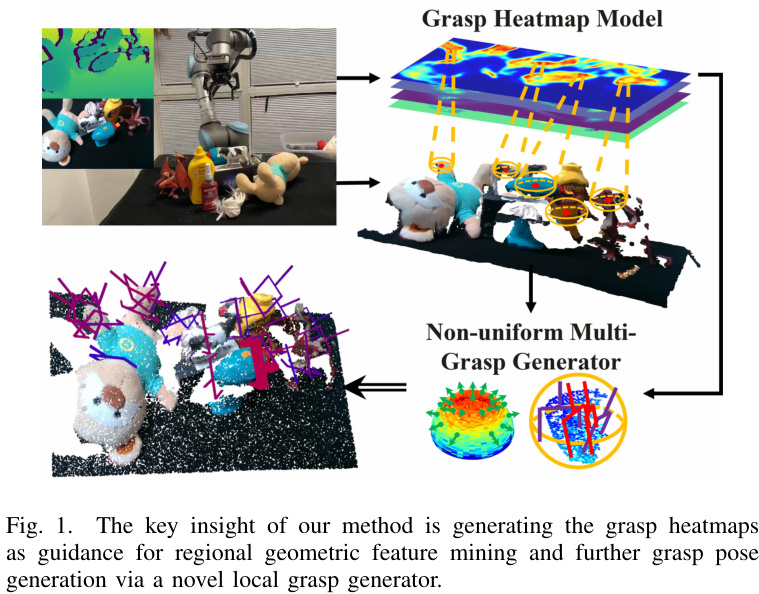
- 高斯编码和基于网格的策略 :用于预测抓取置信度和属性热图,以指导局部点的聚合和抓取姿态的生成。
- 非均匀锚点采样机制 :用于提高抓取的准确性和多样性,通过最小化锚点与实际抓取旋转分布之间的拟合误差来实现。
-
抓取热图模型(GHM) :该模型包含两个输出分支,分别用于构建抓取置信度热图和属性热图。具体步骤包括:
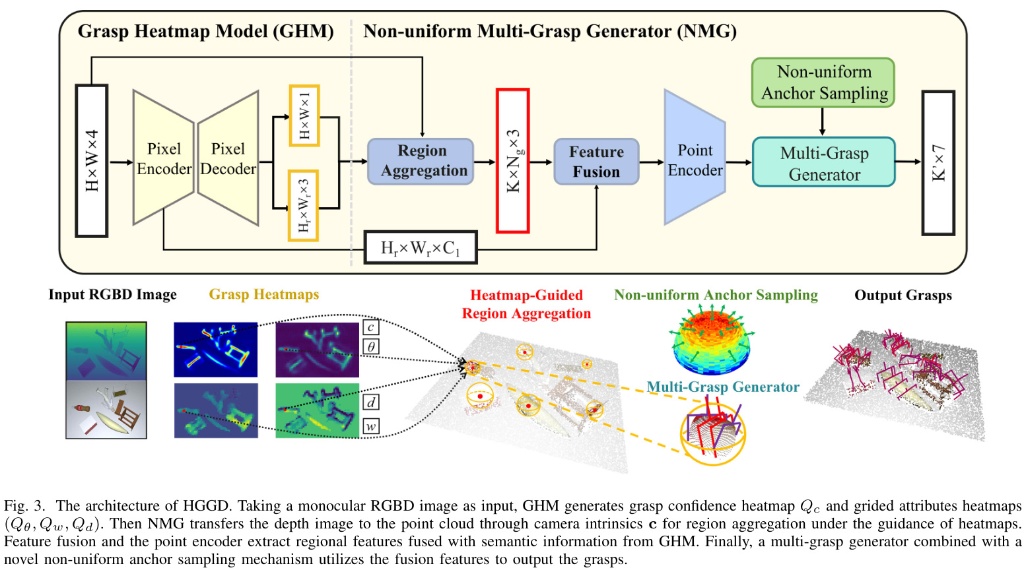
- 高斯编码 :采用二维高斯核对投影的抓取真实中心进行编码,以突出抓取中心并减少附近像素的干扰。
- 基于网格的策略 :将全尺寸图像划分为网格单元,每个单元引入多个定向锚点,通过邻域相似性进行抓取属性的预测。
-
非均匀多抓取生成器(NMG) :该模块利用 GHM 生成的热图作为指导,聚合局部点云并检测抓取。具体步骤包括:
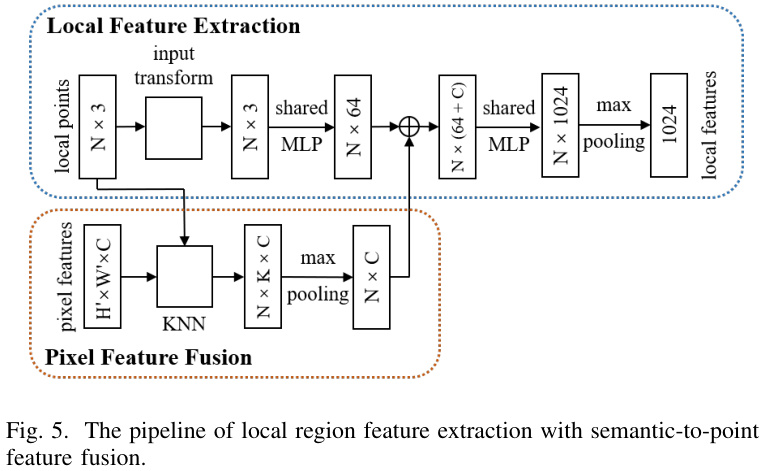
- 热图引导的区域聚合 :通过双线性插值对抓取置信度热图进行下采样,选择置信度最高的网格作为区域中心,并通过球查询和最远点采样聚合局部点云。
- 非均匀锚点采样 :通过迭代锚点偏移算法,动态调整锚点以最小化与实际抓取旋转分布的拟合误差。
- 多抓取生成 :利用多标签分类和锚点回归生成多个抓取,并通过回归三维中心偏移对初始抓取中心进行精化。
实验设计
- 数据集 :实验使用了两个数据集,一个是基于模拟的 TS-ACRONYM 数据集,包含 300 个具有各种典型几何形状的对象,每个对象生成 500 个杂乱场景,每个场景渲染 50 个合成 RGBD 图像;另一个是 GraspNet-1Billion 数据集,包含超过 10 亿个抓取标注。
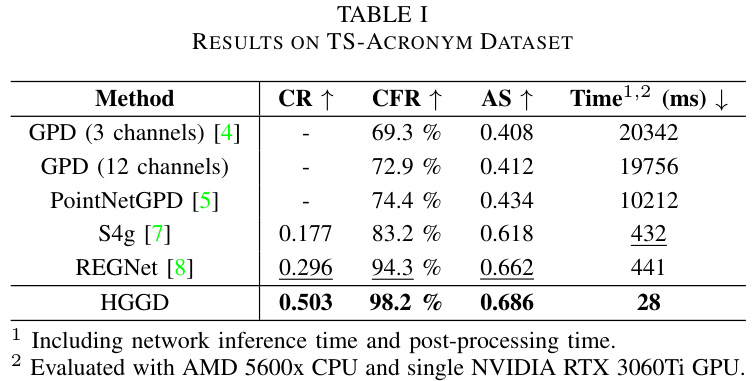
- 评估指标 :对于 TS-ACRONYM 数据集,使用碰撞自由率(CFR)、反极性得分(AS)和覆盖率(CR)来评估抓取质量;对于 GraspNet-1Billion 数据集,使用平均精度(AP)作为评估指标。
- 实验设置 :在 TS-ACRONYM 数据集上,与现有方法(如 GPD 、PointNetGPD 、S4g 和REGNet)进行比较;在 GraspNet-1Billion 数据集上,与 REGNet 和Graspness 进行比较。此外,还进行了消融实验以分析各个模块的作用,并在真实机器人上进行了实验以验证方法的实用性。
结果与分析
-
TS-ACRONYM 数据集 :实验结果表明,HGGD 在CR 、AS 和CFR 指标上显著优于其他方法,能够生成更精确和密集的抓取。此外,HGGD 在实时速度下运行,平均检测时间为 28 毫秒,远快于现有方法。
-
GraspNet-1Billion 数据集 :在确保方法效率的前提下,HGGD 在所有已见、相似和新颖的数据集分割上均实现了显著的 AP 性能提升,证明了其有效性。
-
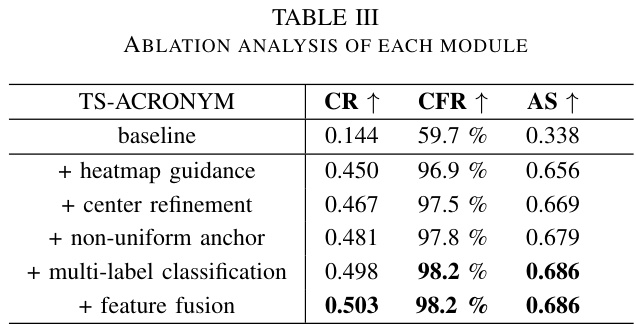
消融实验 :消融实验表明,热图引导的区域聚合显著提高了所有性能指标;中心精化模块显著提高了抓取位置的精度;非均匀锚点采样机制减少了锚点拟合误差,提高了检测抓取的质量。
-
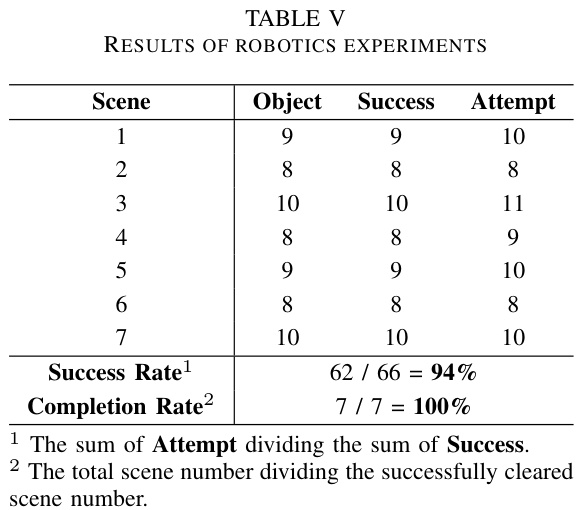
真实机器人实验 :在 UR-5e 机器人上进行的实验表明,HGGD 能够成功应用于真实世界,生成高质量的抓取,成功率高达 94%,杂乱完成率为 100%。
总体结论
这篇论文提出了一种新的端到端 6-Dof 抓取姿态检测框架,通过全局到局部和语义到点的方案,在两个代表性数据集上实现了最先进的性能,且比所有现有方法快得多。尽管该框架是单视图和开环的,限制了其在更复杂场景中的应用,但未来的工作将利用其进行闭环抓取检测,使机器人能够调整预测的抓取姿态并响应环境变化。