目录
1.程序功能描述
2.测试软件版本以及运行结果展示
3.核心程序
4.本算法原理
4.1 基本粒子群算法
4.2 基于PSO的多光谱图像融合算法
5.完整程序
1.程序功能描述
基于PSO粒子群优化的多光谱图像融合算法matlab仿真。多光谱图像融合旨在将高光谱分辨率的多光谱图像(MS)与高空间分辨率的全色图像(PAN)融合,生成同时具备两者优势的合成图像。粒子群优化(Particle Swarm Optimization, PSO)作为一种高效的群体智能算法,在图像融合领域展现出独特优势。
2.测试软件版本以及运行结果展示
matlab2022a/matlab2024b版本运行
图像融合效果:
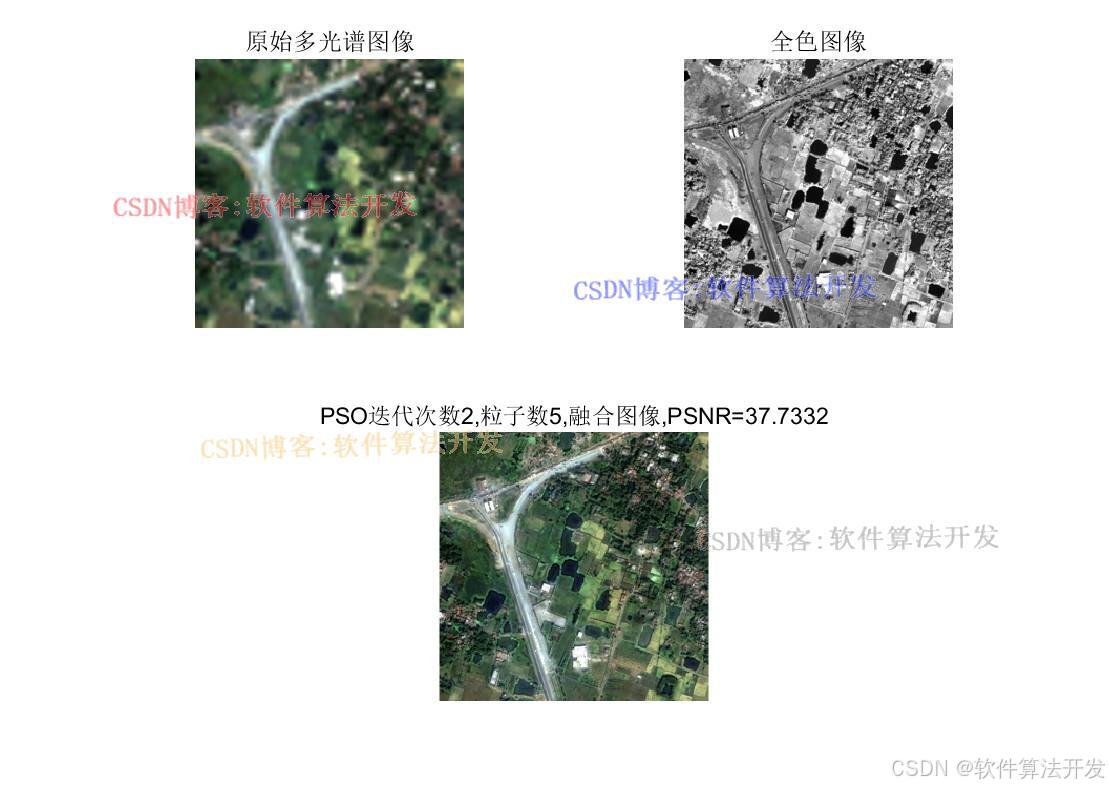
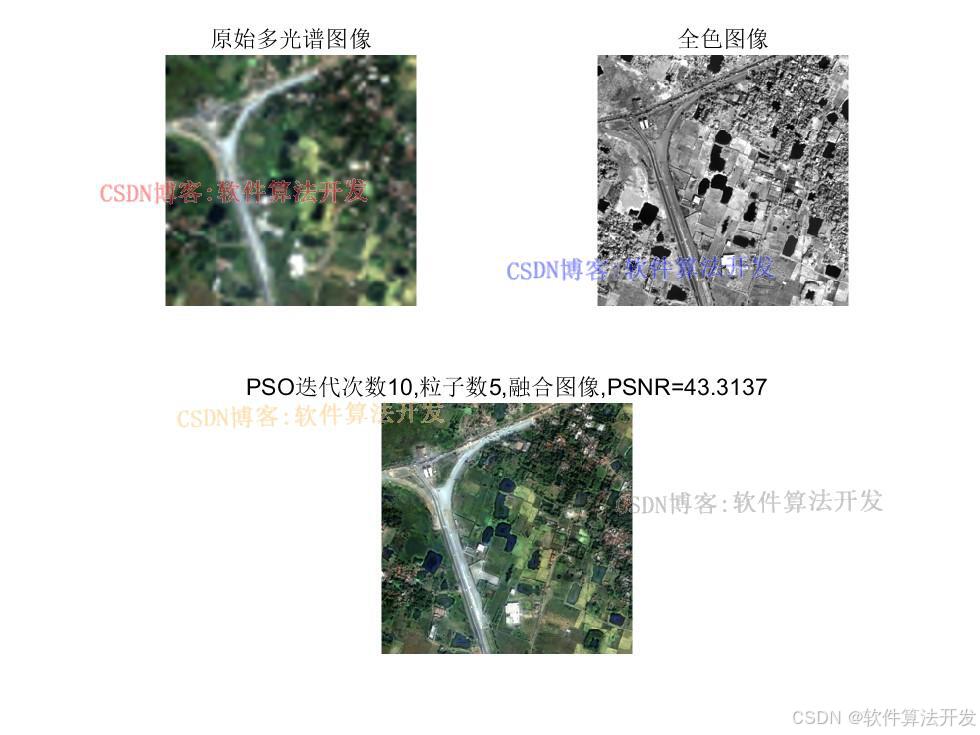
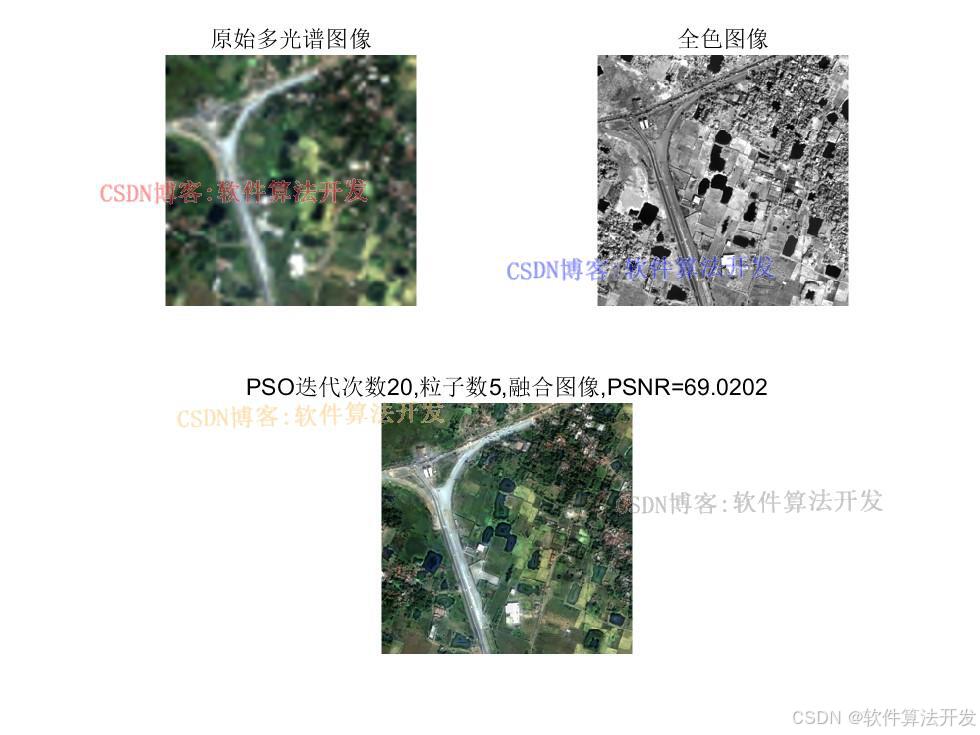
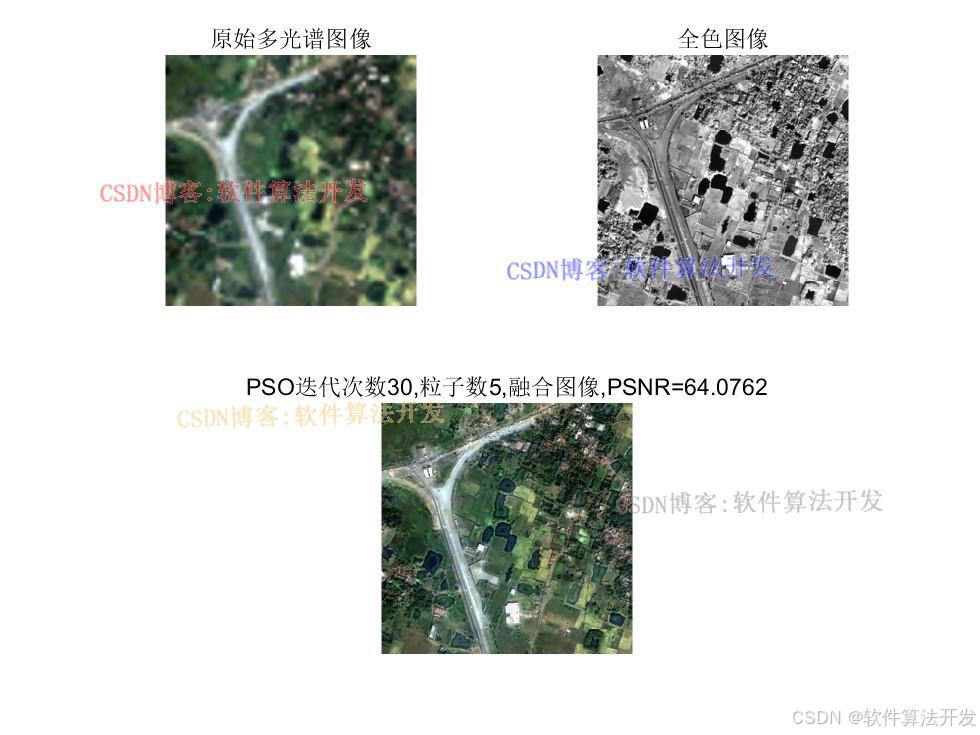
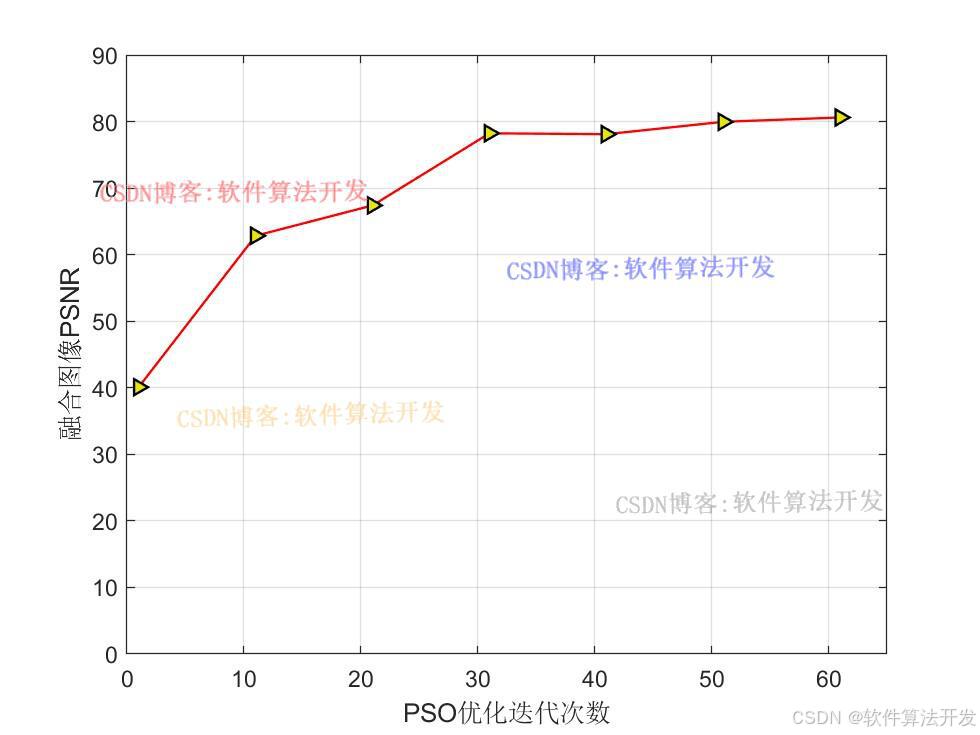
不同迭代次数的性能对比:
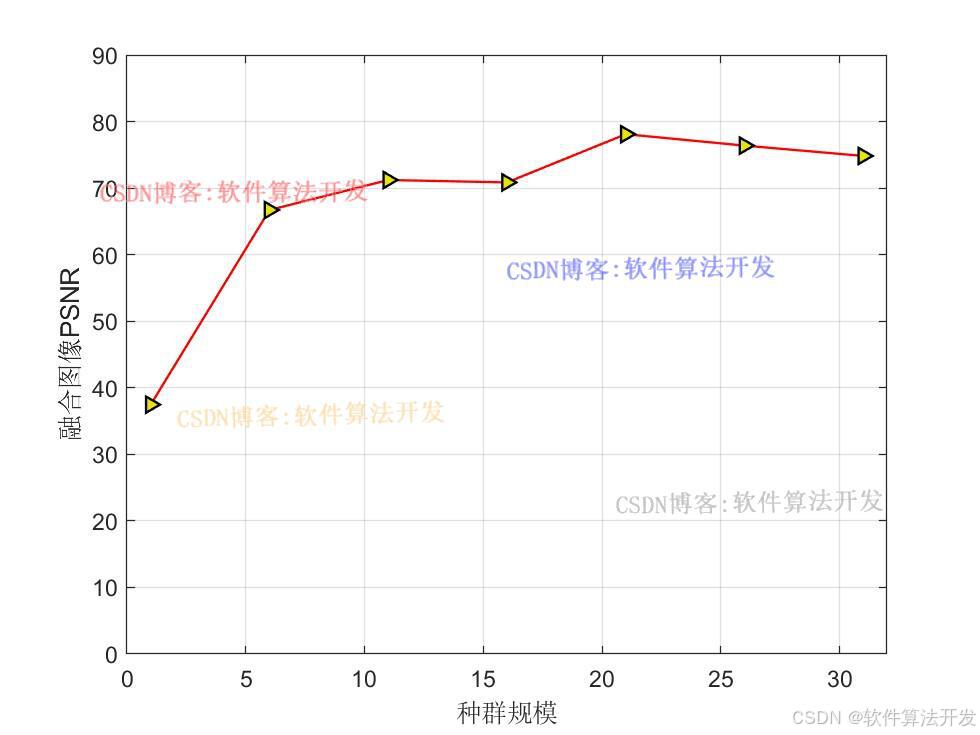
不同粒子群数量规模的性能对比:
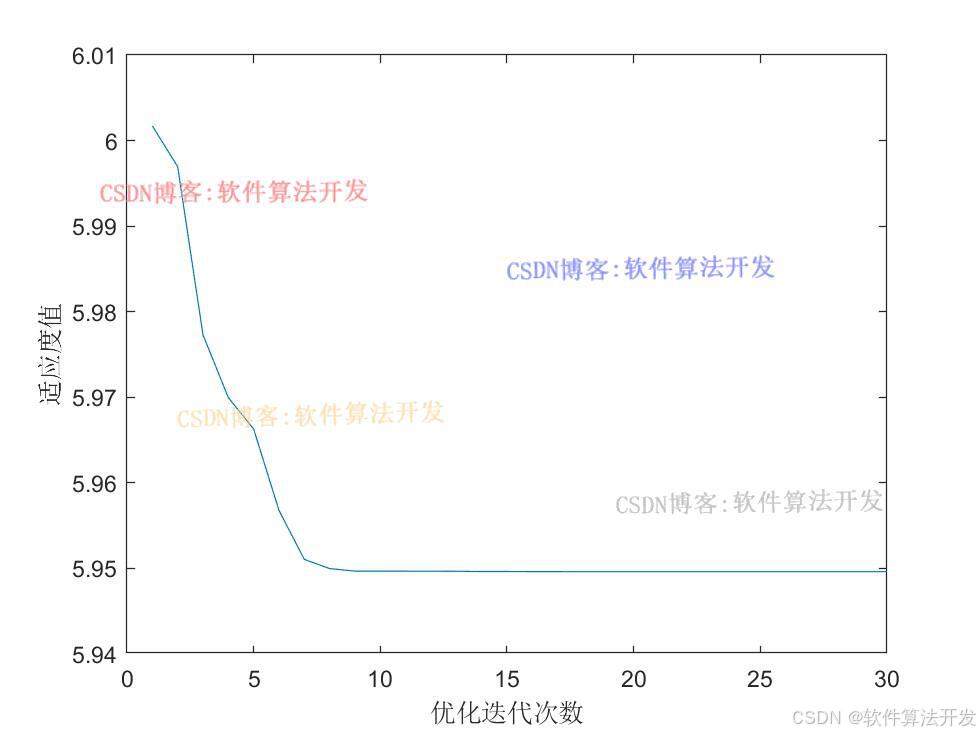
PSO的收敛曲线:
3.核心程序
.................................................
% 粒子群优化主循环
for it = 1:Miteritfor i = 1:Npop% 更新粒子速度X0(i).V = w*X0(i).V + c1*rand(Vnum).*(X0(i).Best.pos - X0(i).pos) + c2*rand(Vnum).*(ybest.pos - X0(i).pos);% 限制速度范围X0(i).V = max(X0(i).V, Vmin);X0(i).V = min(X0(i).V, Vmax);% 更新粒子位置X0(i).pos = X0(i).pos + X0(i).V;% 处理越界位置(速度镜像效应)Idxs = (X0(i).pos < Xmin) | (X0(i).pos > Xmax);X0(i).V(Idxs) = -X0(i).V(Idxs);% 限制位置范围X0(i).pos = max(X0(i).pos, Xmin);X0(i).pos = min(X0(i).pos, Xmax);% 重新计算适应度值X0(i).Cost = func_fitness(X0(i).pos);% 更新个体最优if X0(i).Cost < X0(i).Best.CostX0(i).Best.pos = X0(i).pos;X0(i).Best.Cost = X0(i).Cost;% 更新全局最优if X0(i).Best.Cost < ybest.Costybest = X0(i).Best;endendendBestCost(it) = ybest.Cost; % 记录当前最优适应度w = w * wdamp; % 更新惯性权重
end% 绘制适应度曲线
figure;
plot(BestCost);
xlabel('优化迭代次数');
ylabel('适应度值');Res = func_resout(ybest,bcf,MS2_sm,MS0,Rms,Gms,Bms,Nir,P);% 计算图像质量指标
II = imread('bz.bmp'); % 读取基准图像
[PSNR, MSE] = psnr(II, uint8(Res(:,:,1:3))); % 计算PSNR和MSE% 显示图像结果
figure
subplot(221);
imshow(uint8(MS2_sm0(:,:,1:3))); title('原始多光谱图像');
subplot(222);
imshow(uint8(PAN2_sm)); title('全色图像');
subplot(2,2,[3,4]);
imshow(uint8(Res(:,:,1:3))); title(['PSO迭代次数',num2str(Miter),',粒子数',num2str(Npop),',融合图像,PSNR=',num2str(PSNR)]);
994.本算法原理
多光谱图像融合旨在将高光谱分辨率的多光谱图像(MS)与高空间分辨率的全色图像(PAN)融合,生成同时具备两者优势的合成图像。粒子群优化(Particle Swarm Optimization, PSO)作为一种高效的群体智能算法,在图像融合领域展现出独特优势。
4.1 基本粒子群算法
粒子群优化算法通过模拟鸟群觅食行为,通过迭代更新粒子的速度和位置,寻找最优解。在D 维搜索空间中,粒子i的速度和位置更新公式为:

4.2 基于PSO的多光谱图像融合算法
将不同光谱波段的图像信息进行整合,以获得更丰富、准确的图像内容,提高图像的视觉效果和信息利用率,便于后续的图像分析和处理。
粒子群初始化:随机生成一组粒子,每个粒子代表一种可能的图像融合方案。粒子的位置通常由融合权重等参数表示,这些参数决定了不同光谱图像在融合过程中的贡献程度。同时,为每个粒子随机初始化速度。居中对齐
适应度函数计算:定义一个适应度函数,用于评估每个粒子所代表的融合方案的优劣。常见的适应度函数包括基于图像信息熵、均方误差、结构相似性等指标的函数。通过计算融合图像的相应指标值,来衡量融合图像与原始图像之间的相似性和信息保留程度。
粒子更新:根据粒子的当前位置和速度,以及自身的历史最优位置和群体的全局最优位置,按照 PSO 算法的更新公式来更新粒子的速度和位置。速度更新公式通常考虑粒子的当前速度、自身历史最优位置与当前位置的差值、全局最优位置与当前位置的差值等因素;位置更新则是在当前位置的基础上加上更新后的速度。
终止条件判断:判断是否满足算法的终止条件,如达到最大迭代次数、适应度函数值收敛到一定阈值等。如果满足终止条件,则停止迭代,输出当前的全局最优解,即最优的图像融合方案;否则,返回步骤 4 继续迭代。
图像融合:根据得到的最优融合方案,将多光谱图像进行融合。融合过程可以采用加权平均、小波变换等多种方法,利用优化后的权重对不同光谱图像的特征进行组合,生成融合后的图像。
5.完整程序
VVV