设备位姿描述了物体在真实世界中的位置和朝向。AR Engine提供了世界坐标下6自由度(6DoF)的位姿计算,包括物体的位置(沿x、y、z轴方向位移)和朝向(绕x、y、z轴旋转)。通过AR Engine,您可以实时获取设备在空间中任意时刻的位姿。
创建ARSession
您可以参考管理AR会话创建ARSession。
世界坐标系
设备位姿一般在世界坐标系下进行表示。世界坐标系描述了真实物理空间中物体的绝对位置,其正方向如图所示。
图1 世界坐标系示意图
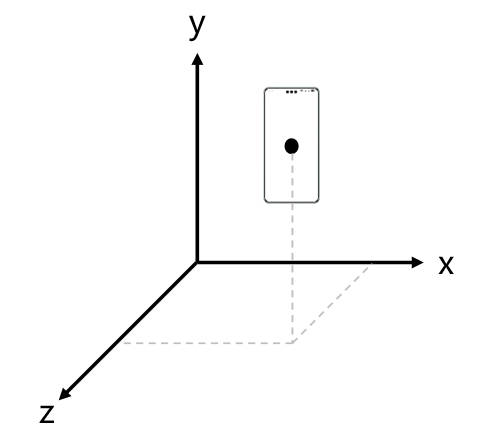
AR Engine会帮助您自动完成世界坐标系初始化。
获取设备当前位姿
- 创建一个空位姿变量cameraPose。
- AREngine_ARPose *cameraPose = nullptr;
- HMS_AREngine_ARPose_Create(arSession, nullptr, 0, &cameraPose);
- 获取当前时刻相机位姿信息,并存储在cameraPose变量中。
- // 创建一个新的AREngine_ARFrame对象。
- AREngine_ARFrame *arFrame = nullptr;
- HMS_AREngine_ARFrame_Create(arSession, &arFrame);
- // 更新当前帧的结果到arFrame。
- HMS_AREngine_ARSession_Update(arSession, arFrame);
- // 获取当前帧的相机参数对象。
- AREngine_ARCamera *arCamera = nullptr;
- HMS_AREngine_ARFrame_AcquireCamera(arSession, arFrame, &arCamera);
- // 获取当前时刻相机位姿信息。
- HMS_AREngine_ARCamera_GetPose(arSession, arCamera, cameraPose);
- 从cameraPose中获取相机位姿的不同分量,包括平移分量和旋转分量。
- float poseRaw[7] = { 0.0f };
- HMS_AREngine_ARPose_GetPoseRaw(arSession, cameraPose, poseRaw, 7);
AR Engine中,设备位姿由一个7维向量描述,包括旋转量
![]()
和位移量
![]()
。其中旋转量
![]()
是一组四元数,描述了设备相对于坐标原点的旋转状态;位移量是一组三维向量,描述了设备相对于坐标原点的平移状态,如下图所示。
图2 设备位姿的旋转和平移变化示意图
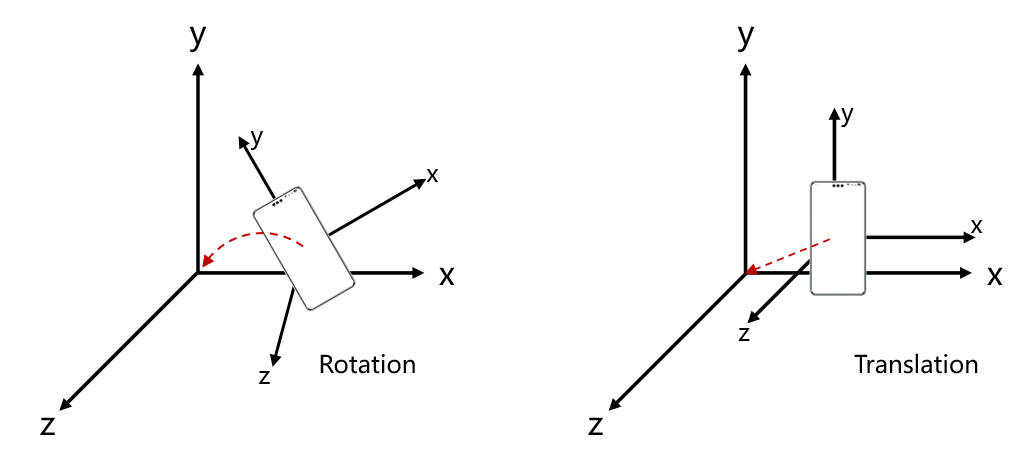
通过旋转分量和平移分量,您可以完备的描述设备位姿在空间中任意时刻的位姿状态。