【GeoTransformer系列】——模型部分
- 1. create_model
- 2. model的本质
- 3. 模型的主要结构
- 3.1 backbone
- 3.2 transformer
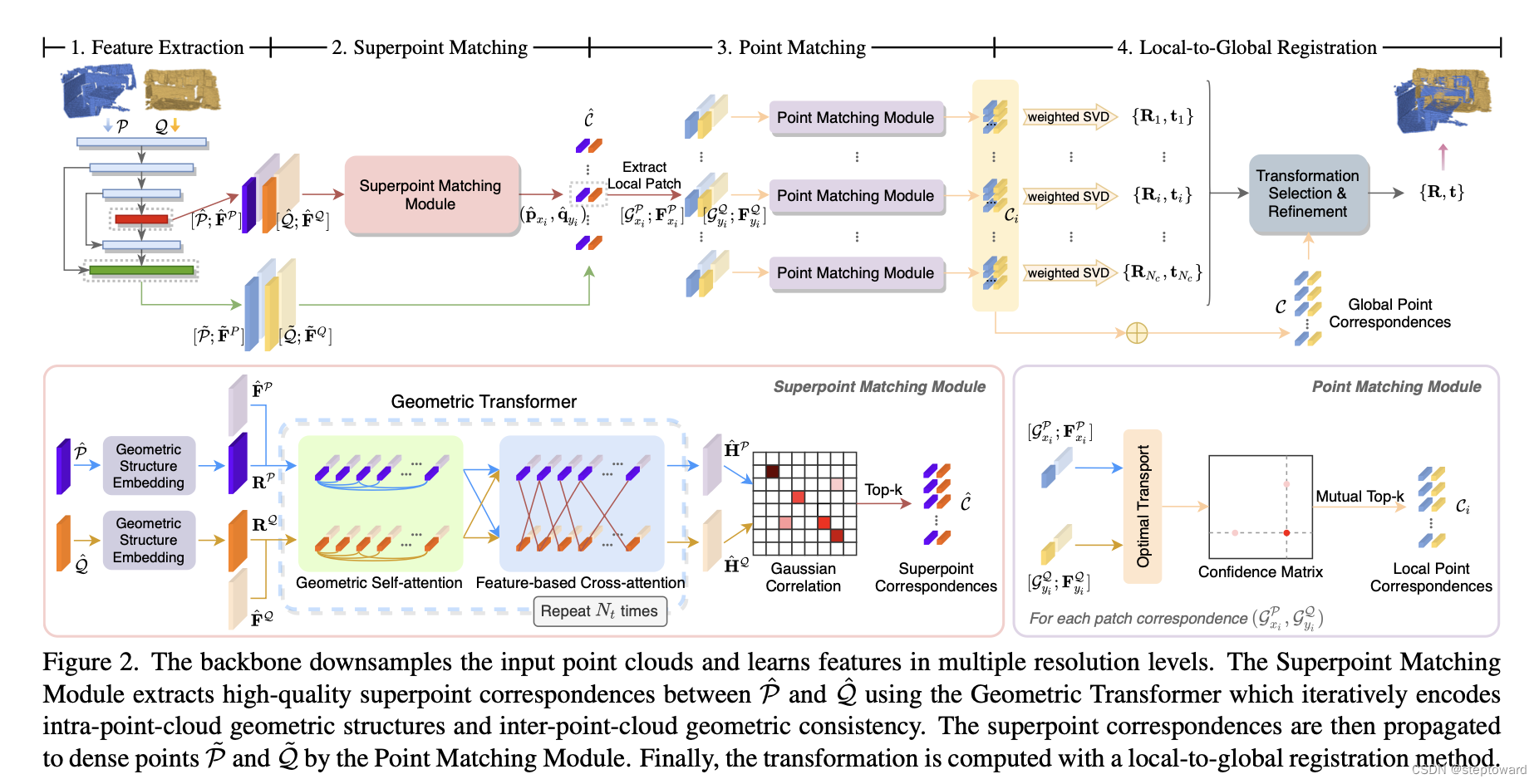
本篇继续对GeoTransformer/experiments/geotransformer.kitti.stage5.gse.k3.max.oacl.stage2.sinkhorn/下面的trainval.py进行详细的解读,主要是模型部分, 可以与论文中的图2对照着来理解.
1. create_model
首先, 纵观这个文件, 会发现模型的训练器其实就是一个Trainer类的实例.
而我们要训练的网络,实际上是Trainer类中的一个成员——model.
它在类的初始化函数中, 通过create_model函数来创建, 然后通过类中的register_model方法注册到实例中.
而create_model函数是在trainval.py的同级目录下model.py中被定义的.
在trainval.py代码的开头, 就导入了同级目录下model.py中的create_model函数. 这部分的代码如下:
##...
from model import create_model
##...
class