关于中断部分系列篇将用三篇详细说明整个过程.
-
中断概念篇 中断概念很多,比如中断控制器,中断源,中断向量,中断共享,中断处理程序等等.本篇做一次整理.先了解透概念才好理解中断过程.用海公公打比方说明白中断各个概念.
-
中断管理篇 从中断初始化
HalIrqInit开始,到注册中断的LOS_HwiCreate函数,到消费中断函数的HalIrqHandler,剖析鸿蒙内核实现中断的过程,很像设计模式中的观察者模式. -
中断切换篇(本篇) 用自下而上的方式,从中断源头纯汇编代码往上跟踪代码细节.说清楚保存和恢复中断现场
TaskIrqContext过程.
中断环境下的任务切换
在鸿蒙的内核线程就是任务,系列篇中说的任务和线程当一个东西去理解.
一般二种场景下需要切换任务上下文:
-
在中断环境下,从当前线程切换到目标线程,这种方式也称为硬切换.它们通常由硬件产生或是软件发生异常时的被动式切换.哪些情况下会出现硬切换呢?
- 中断源可分外部和内部中断源两大类,比如 鼠标,键盘外部设备每次点击和敲打,屏幕的触摸,USB的插拔等等这些都是外部中断源.存储器越限、缺页,核间中断,断点中断等等属于内部中断源.由此产生的硬切换都需要换栈运行,硬切换硬在需切换工作模式(中断模式).所以会比线程环境下的切换更复杂点,但道理还是一样要保存和恢复切换现场寄存器的值, 而保存寄存器顺序格式结构体叫:任务中断上下文(
TaskIrqContext).
- 中断源可分外部和内部中断源两大类,比如 鼠标,键盘外部设备每次点击和敲打,屏幕的触摸,USB的插拔等等这些都是外部中断源.存储器越限、缺页,核间中断,断点中断等等属于内部中断源.由此产生的硬切换都需要换栈运行,硬切换硬在需切换工作模式(中断模式).所以会比线程环境下的切换更复杂点,但道理还是一样要保存和恢复切换现场寄存器的值, 而保存寄存器顺序格式结构体叫:任务中断上下文(
-
在线程环境下,从当前线程切换到目标线程,这种方式也称为软切换,能由软件控制的自主式切换.哪些情况下会出现软切换呢?
- 运行的线程申请某种资源(比如各种锁,读/写消息队列)失败时,需要主动释放CPU的控制权,将自己挂入等待队列,调度算法重新调度新任务运行.
- 每隔10ms就执行一次的
OsTickHandler节拍处理函数,检测到任务的时间片用完了,就发起任务的重新调度,切换到新任务运行. - 不管是内核态的任务还是用户态的任务,于切换而言是统一处理,一视同仁的,因为切换是需要换栈运行,寄存器有限,需要频繁的复用,这就需要将当前寄存器值先保存到任务自己的栈中,以便别人用完了轮到自己再用时恢复寄存器当时的值,确保老任务还能继续跑下去. 而保存寄存器顺序格式结构体叫:任务上下文(
TaskContext).
本篇说清楚在中断环境下切换(硬切换)的实现过程.
ARM的七种工作模式中,有两个是和中断相关.
- 普通中断模式(irq):一般中断模式也叫普通中断模式,用于处理一般的中断请求,通常在硬件产生中断信号之后自动进入该模式,该模式可以自由访问系统硬件资源。
- 快速中断模式(fiq):快速中断模式是相对一般中断模式而言的,用来处理高优先级中断的模式,处理对时间要求比较紧急的中断请求,主要用于高速数据传输及通道处理中。
此处分析普通中断模式下的任务切换过程.
普通中断模式相关寄存器
这张图一定要刻在脑海里,系列篇会多次拿出来,目的是为了能牢记它.

- 普通中断模式(图中IRQ列)是一种异常模式,有自己独立运行的栈空间.一个(IRQ)中断发生后,硬件会将CPSR寄存器工作模式置为IRQ模式.并跳转到入口地址
OsIrqHandler执行.
#define OS_EXC_IRQ_STACK_SIZE 64 //中断模式栈大小 64个字节
__irq_stack:.space OS_EXC_IRQ_STACK_SIZE * CORE_NUM
__irq_stack_top:
OsIrqHandler汇编代码实现过程,就干了三件事:- 1.保存任务中断上下文
TaskIrqContext - 2.执行中断处理程序
HalIrqHandler,这是个C函数,由汇编调用 - 3.恢复任务中断上下文
TaskIrqContext,返回被中断的任务继续执行
- 1.保存任务中断上下文
TaskIrqContext 和 TaskContext
先看本篇结构体 TaskIrqContext
#define TASK_IRQ_CONTEXT \unsigned int R0; \unsigned int R1; \unsigned int R2; \unsigned int R3; \unsigned int R12; \unsigned int USP; \unsigned int ULR; \unsigned int CPSR; \unsigned int PC;typedef struct {//任务中断上下文
#if !defined(LOSCFG_ARCH_FPU_DISABLE)UINT64 D[FP_REGS_NUM]; /* D0-D31 */UINT32 regFPSCR; /* FPSCR */UINT32 regFPEXC; /* FPEXC */
#endifUINT32 resved;TASK_IRQ_CONTEXT
} TaskIrqContext;
typedef struct {//任务上下文,已在任务切换篇中详细说明,放在此处是为了对比
#if !defined(LOSCFG_ARCH_FPU_DISABLE)UINT64 D[FP_REGS_NUM]; /* D0-D31 */UINT32 regFPSCR; /* FPSCR */UINT32 regFPEXC; /* FPEXC */
#endifUINT32 resved; /* It's stack 8 aligned */UINT32 regPSR; //保存CPSR寄存器UINT32 R[GEN_REGS_NUM]; /* R0-R12 */UINT32 SP; /* R13 */UINT32 LR; /* R14 */UINT32 PC; /* R15 */
} TaskContext;
- 两个结构体很简单,目的更简单,就是用来保存寄存器现场的值的.
TaskContext把17个寄存器全部保存了,TaskIrqContext保存的少些,在栈中并没有保存R4-R11寄存器的值,这说明在整个中断处理过程中,都不会用到R4-R11寄存器.不会用到就不会改变,当然就没必要保存了.这也说明内核开发者的严谨程度,不造成时间和空间上的一丁点浪费.效率的提升是从细节处入手的,每个小地方优化那么一丢丢,整体性能就上来了. TaskIrqContext中有两个变量有点奇怪unsigned int USP;unsigned int ULR;指的是用户模式下的SP和LR值, 这个要怎么理解? 因为对一个正运行的任务而言,中断的到来是颗不定时炸弹,无法预知,也无法提前准备,中断一来它立即被打断,压根没有时间去保存现场到自己的栈中,那保存工作只能是放在IRQ栈或者SVC栈中.而IRQ栈非常的小,只有64个字节,16个栈空间,指望不上了,就保存在SVC栈中,SVC模式栈可是有 8K空间的.- 从接下来的
OsIrqHandler代码中可以看出,鸿蒙内核整个中断的工作其实都是在SVC模式下完成的,而irq的栈只是个过渡栈.具体看汇编代码逐行注解分析.
普通中断处理程序
OsIrqHandler: @硬中断处理,此时已切换到硬中断栈SUB LR, LR, #4 @记录译码指令地址,以防切换过程丢失指令/* push r0-r3 to irq stack */ @irq栈只是个过渡栈STMFD SP, {R0-R3} @r0-r3寄存器入 irq 栈SUB R0, SP, #(4 * 4)@r0 = sp - 16,目的是记录{R0-R3}4个寄存器保存的开始位置,届时从R3开始出栈MRS R1, SPSR @获取程序状态控制寄存器MOV R2, LR @r2=lr/* disable irq, switch to svc mode */@超级用户模式(SVC 模式),主要用于 SWI(软件中断)和 OS(操作系统)。CPSID i, #0x13 @切换到SVC模式,此处一切换,后续指令将在SVC栈运行@CPSID i为关中断指令,对应的是CPSIE@TaskIrqContext 开始保存中断现场 ...... /* push spsr and pc in svc stack */STMFD SP!, {R1, R2} @实际是将 SPSR,和PC入栈对应TaskIrqContext.PC,TaskIrqContext.CPSR,STMFD SP, {LR} @LR再入栈,SP不自增,如果是用户模式,LR值将被 282行:STMFD SP, {R13, R14}^覆盖 @如果非用户模式,将被 286行:SUB SP, SP, #(2 * 4) 跳过.AND R3, R1, #CPSR_MASK_MODE @获取CPU的运行模式CMP R3, #CPSR_USER_MODE @中断是否发生在用户模式BNE OsIrqFromKernel @非用户模式不用将USP,ULR保存在TaskIrqContext/* push user sp, lr in svc stack */STMFD SP, {R13, R14}^ @将用户模式的sp和LR入svc栈OsIrqFromKernel: @从内核发起中断/* from svc not need save sp and lr */@svc模式下发生的中断不需要保存sp和lr寄存器值SUB SP, SP, #(2 * 4) @目的是为了留白给 TaskIrqContext.USP,TaskIrqContext.ULR@TaskIrqContext.ULR已经在 276行保存了,276行用的是SP而不是SP!,所以此处要跳2个空间/* pop r0-r3 from irq stack*/LDMFD R0, {R0-R3} @从R0位置依次出栈 /* push caller saved regs as trashed regs in svc stack */STMFD SP!, {R0-R3, R12} @寄存器入栈,对应 TaskIrqContext.R0~R3,R12/* 8 bytes stack align */SUB SP, SP, #4 @栈对齐 对应TaskIrqContext.resved/** save fpu regs in case in case those been* altered in interrupt handlers.*/PUSH_FPU_REGS R0 @保存fpu regs,以防中断处理程序中的fpu regs被修改。@TaskIrqContext 结束保存中断现场...... @开始执行真正的中断处理函数了.
#ifdef LOSCFG_IRQ_USE_STANDALONE_STACK @是否使用了独立的IRQ栈PUSH {R4} @R4先入栈保存,接下来要切换栈,需保存现场MOV R4, SP @R4=SPEXC_SP_SET __svc_stack_top, OS_EXC_SVC_STACK_SIZE, R1, R2 @切换到svc栈
#endif/*BLX 带链接和状态切换的跳转*/BLX HalIrqHandler /* 调用硬中断处理程序,无参 ,说明HalIrqHandler在svc栈中执行 */#ifdef LOSCFG_IRQ_USE_STANDALONE_STACK @是否使用了独立的IRQ栈MOV SP, R4 @恢复现场,sp = R4 POP {R4} @弹出R4
#endif/* process pending signals */ @处理挂起信号BL OsTaskProcSignal @跳转至C代码 /* check if needs to schedule */@检查是否需要调度CMP R0, #0 @是否需要调度,R0为参数保存值BLNE OsSchedPreempt @不相等,即R0非0,一般是 1MOV R0,SP @参数MOV R1,R7 @参数BL OsSaveSignalContextIrq @跳转至C代码 /* restore fpu regs */POP_FPU_REGS R0 @恢复fpu寄存器值ADD SP, SP, #4 @sp = sp + 4 OsIrqContextRestore: @恢复硬中断环境LDR R0, [SP, #(4 * 7)] @R0 = sp + 7,目的是跳到恢复中断现场TaskIrqContext.CPSR位置,刚好是TaskIrqContext倒数第7的位置.MSR SPSR_cxsf, R0 @恢复spsr 即:spsr = TaskIrqContext.CPSRAND R0, R0, #CPSR_MASK_MODE @掩码找出当前工作模式CMP R0, #CPSR_USER_MODE @是否为用户模式?@TaskIrqContext 开始恢复中断现场 ...... LDMFD SP!, {R0-R3, R12} @从SP位置依次出栈 对应 TaskIrqContext.R0~R3,R12@此时已经恢复了5个寄存器,接来下是TaskIrqContext.USP,TaskIrqContext.ULRBNE OsIrqContextRestoreToKernel @看非用户模式,怎么恢复中断现场./* load user sp and lr, and jump cpsr */LDMFD SP, {R13, R14}^ @出栈,恢复用户模式sp和lr值 即:TaskIrqContext.USP,TaskIrqContext.ULRADD SP, SP, #(3 * 4) @跳3个位置,跳过 CPSR ,因为上一句不是 SP!,所以跳3个位置,刚好到了保存TaskIrqContext.PC的位置/* return to user mode */LDMFD SP!, {PC}^ @回到用户模式,整个中断过程完成@TaskIrqContext 结束恢复中断现场(用户模式下) ...... OsIrqContextRestoreToKernel:@从内核恢复中断/* svc mode not load sp */ADD SP, SP, #4 @其实是跳过TaskIrqContext.USP,因为在内核模式下并没有保存这个值,翻看 287行LDMFD SP!, {LR} @弹出LR/* jump cpsr and return to svc mode */ADD SP, SP, #4 @跳过cpsrLDMFD SP!, {PC}^ @回到svc模式,整个中断过程完成@TaskIrqContext 结束恢复中断现场(内核模式下) ......逐句解读
- 跳转到
OsIrqFromKernel硬件会自动切换到__irq_stack执行 - 1句:
SUB LR, LR, #4在arm执行过程中一般分为取指,译码,执行阶段,而PC是指向取指,正在执行的指令为 PC-8 ,译码指令为PC-4.当中断发生时硬件自动执行 mov lr pc, 中间的PC-4译码指令因为没有寄存器去记录它,就会被丢失掉.所以SUB LR, LR, #4的结果是lr = PC -4 ,定位到了被中断时译码指令,将在栈中保存这个位置,确保回来后能继续执行. - 2句:
STMFD SP, {R0-R3}当前4个寄存器入__irq_stack保存 - 3句:
SUB R0, SP, #(4 * 4)因为SP没有自增,R0跳到保存R0内容地址 - 4,5句:读取SPSR,LR寄存器内容,目的是为了后面在SVC栈中保存
TaskIrqContext - 6句:
CPSID i, #0x13禁止中断和切换SVC模式,执行完这条指令后工作模式将切到 SVC模式 - @TaskIrqContext 开始保存中断现场 …
- 中间代码需配合
TaskIrqContext来看,不然100%懵逼.结合看就秒懂,代码都已经注释,不再做解释,注解中提到的 翻看276行 是指源码的第276行,请对照注解源码看理解会更透彻. - @TaskIrqContext 结束保存中断现场 …
TaskIrqContext保存完现场后就真正的开始处理中断了.
/*BLX 带链接和状态切换的跳转*/BLX HalIrqHandler /* 调用硬中断处理程序,无参 ,说明HalIrqHandler在svc栈中执行 */
#ifdef LOSCFG_IRQ_USE_STANDALONE_STACK @是否使用了独立的IRQ栈MOV SP, R4 @恢复现场,sp = R4 POP {R4} @弹出R4
#endif/* process pending signals */ @处理挂起信号BL OsTaskProcSignal @跳转至C代码 /* check if needs to schedule */@检查是否需要调度CMP R0, #0 @是否需要调度,R0为参数保存值BLNE OsSchedPreempt @不相等,即R0非0,一般是 1MOV R0,SP @参数MOV R1,R7 @参数BL OsSaveSignalContextIrq @跳转至C代码 /* restore fpu regs */POP_FPU_REGS R0 @恢复fpu寄存器值ADD SP, SP, #4 @sp = sp + 4
-
这段代码都是跳转到C语言去执行,分别是
HalIrqHandlerOsTaskProcSignalOsSchedPreemptOsSaveSignalContextIrqC语言部分内容很多,将在中断管理篇中说明. -
@TaskIrqContext 开始恢复中断现场 …
-
同样的中间代码需配合
TaskIrqContext来看,不然100%懵逼.结合看就秒懂,代码都已经注释,不再做解释,注解中提到的 翻看287行 是指源码的第287行,请对照注解源码看理解会更透彻.进入源码注解地址查看 -
@TaskIrqContext 结束恢复中断现场 …
经常有很多小伙伴抱怨说:不知道学习鸿蒙开发哪些技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?
为了能够帮助到大家能够有规划的学习,这里特别整理了一套纯血版鸿蒙(HarmonyOS Next)全栈开发技术的学习路线,包含了鸿蒙开发必掌握的核心知识要点,内容有(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、WebGL、元服务、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、OpenHarmony驱动开发、系统定制移植等等)鸿蒙(HarmonyOS NEXT)技术知识点。

《鸿蒙 (Harmony OS)开发学习手册》(共计892页):https://gitcode.com/HarmonyOS_MN
如何快速入门?
1.基本概念
2.构建第一个ArkTS应用
3.……
开发基础知识:
1.应用基础知识
2.配置文件
3.应用数据管理
4.应用安全管理
5.应用隐私保护
6.三方应用调用管控机制
7.资源分类与访问
8.学习ArkTS语言
9.……
基于ArkTS 开发
1.Ability开发
2.UI开发
3.公共事件与通知
4.窗口管理
5.媒体
6.安全
7.网络与链接
8.电话服务
9.数据管理
10.后台任务(Background Task)管理
11.设备管理
12.设备使用信息统计
13.DFX
14.国际化开发
15.折叠屏系列
16.……
鸿蒙开发面试真题(含参考答案):https://gitcode.com/HarmonyOS_MN
OpenHarmony 开发环境搭建
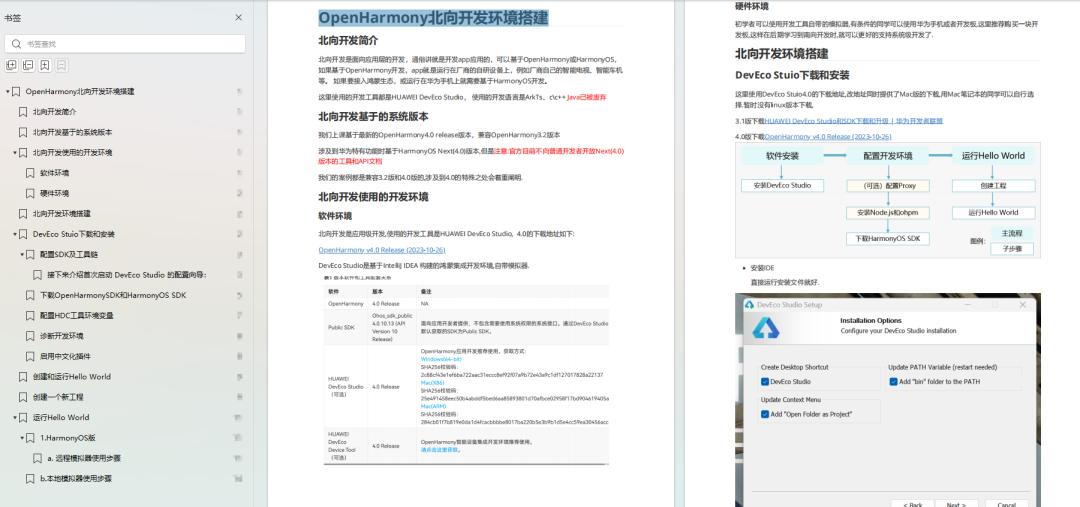
《OpenHarmony源码解析》:https://gitcode.com/HarmonyOS_MN
- 搭建开发环境
- Windows 开发环境的搭建
- Ubuntu 开发环境搭建
- Linux 与 Windows 之间的文件共享
- ……
- 系统架构分析
- 构建子系统
- 启动流程
- 子系统
- 分布式任务调度子系统
- 分布式通信子系统
- 驱动子系统
- ……
OpenHarmony 设备开发学习手册:https://gitcode.com/HarmonyOS_MN
写在最后
如果你觉得这篇内容对你还蛮有帮助,我想邀请你帮我三个小忙:
- 点赞,转发,有你们的 『点赞和评论』,才是我创造的动力。
- 关注小编,同时可以期待后续文章ing🚀,不定期分享原创知识。
- 想要获取更多完整鸿蒙最新学习资源,请移步前往
