🔍
B站相应的视屏教程:
📌 内核:博文+视频 - 从静态绑定驱动模型到现代设备模型
在 Linux 内核的发展历程中,设备驱动结构经历了从"硬编码 + 手动注册"的早期实现方式,到"设备模型统一管理"的现代化架构。这一演进不仅改变了驱动开发者的习惯,也极大提升了内核的可维护性、扩展性与模块化能力。
本篇博文将聚焦早期的 静态绑定驱动模型(Static Binding Driver Model),深入讲解其原理、结构、优缺点,并与后续的设备模型机制进行对比,帮助读者建立完整的认知脉络。
📘 第一部分:什么是静态绑定驱动模型?
所谓“静态绑定”,是指驱动代码中通过硬编码的方式指定所使用的设备资源(如物理地址、中断号、引脚编号等),并在模块初始化过程中手动完成所有注册与初始化步骤。
这种方式广泛存在于 Linux v2.4 及更早版本 中,当时还没有统一的 struct device、platform_driver、of_match_table 等机制。
✅ 核心特征
| 特征类别 | 表现 |
|---|---|
| 资源管理 | 资源地址、IRQ 手动硬编码 |
| 匹配机制 | 没有匹配机制,全靠人工指定 |
| 驱动结构 | 所有逻辑集中在 init 函数中 |
| 生命周期管理 | 没有 probe/remove 接口 |
| 模块加载 | 无法自动匹配,仅靠 insmod |
| 用户态接口 | 无 sysfs 映射,udev 不可见 |
📌 示例:静态绑定驱动代码片段
#define LCDIF3_BASE 0x32fc6000
#define LCDIF3_IRQ 42static void __iomem *lcd_base;static int __init lcd_driver_init(void)
{request_mem_region(LCDIF3_BASE, 0x1000, "lcdif");lcd_base = ioremap(LCDIF3_BASE, 0x1000);request_irq(LCDIF3_IRQ, lcd_irq_handler, 0, "lcdif", NULL);// 初始化寄存器writel(0x01, lcd_base + 0x00);printk("lcd driver loaded\n");return 0;
}static void __exit lcd_driver_exit(void)
{free_irq(LCDIF3_IRQ, NULL);iounmap(lcd_base);release_mem_region(LCDIF3_BASE, 0x1000);
}module_init(lcd_driver_init);
module_exit(lcd_driver_exit);
MODULE_LICENSE("GPL");
📘 第二部分:静态绑定模型的优缺点
✅ 优点
- 实现简单,易于快速验证硬件逻辑
- 没有抽象层,调试路径清晰
- 适用于早期定制板、实验性代码
❌ 缺点
| 问题类型 | 描述 |
|---|---|
| 可移植性差 | 所有硬件信息写死在代码中,不易适配新平台 |
| 不支持热插拔 | 无法根据硬件动态加载驱动模块,udev 无法使用 |
| 维护困难 | 所有初始化、清理逻辑集中在一个文件中,不易分离模块 |
| 无法复用 | 没有设备模型的抽象结构,代码难以共享给其他项目或平台 |
| 无法使用设备树 | 与现代 SoC 的 DTS 描述方式不兼容,不能通过 compatible 匹配驱动 |
📘 第三部分:设备模型的引入与演进
Linux 内核从 v2.5.x 开始引入设备模型(Device Model),在 v2.6.0(2003 年) 正式启用。
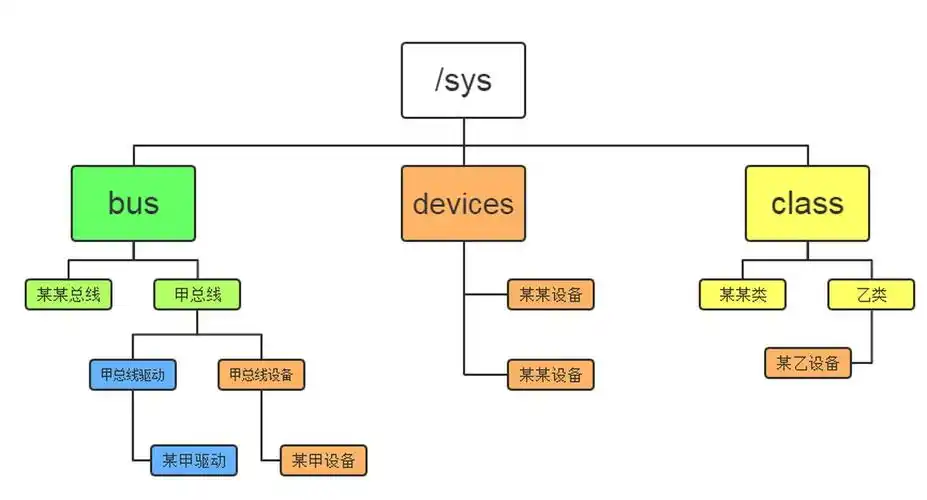
它提供了统一的结构用于描述设备(struct device)、驱动(struct device_driver)、总线(struct bus_type)与设备类(struct class),实现驱动与设备的解耦、匹配与动态管理。
📎 核心机制
| 结构体 | 作用说明 |
|---|---|
struct device | 表示一个设备本体,包含资源、状态等 |
struct driver | 表示驱动代码与功能结构 |
struct bus_type | 表示设备与驱动的匹配方式(如 platform) |
struct class | 用于创建 /sys/class/ 接口 |
✅ 匹配机制演进
// 匹配表(由驱动提供)
static const struct of_device_id xxx_of_match[] = {{ .compatible = "fsl,imx8mp-lcdif1" },{}
};// 驱动注册结构
static struct platform_driver xxx_driver = {.probe = xxx_probe,.remove = xxx_remove,.driver = {.name = "lcdif",.of_match_table = xxx_of_match,},
};
📘 自动加载与用户空间联动
- sysfs 自动创建
/sys/devices/platform/... /sys/bus/platform/drivers/...中挂接驱动- udev 可根据 alias 自动调用 modprobe 加载模块
📘 第四部分:对比分析:静态绑定 vs 设备模型
| 对比维度 | 静态绑定驱动 | 设备模型驱动 |
|---|---|---|
| 资源定义 | 硬编码 | 通过 DTS 或 platform_device 动态提供 |
| 匹配机制 | 无自动匹配 | 支持 of_match_table 自动绑定 |
| 生命周期管理 | 通过 module_init/exit 手动完成 | 通过 probe/remove 自动分离处理 |
| 可移植性 | 不具备平台适配能力 | 支持同一驱动在多个硬件平台间共享 |
| sysfs 支持 | 不支持 | 自动创建设备节点,支持 udev、热插拔等 |
| 资源释放 | 手动 free_irq/iounmap | 支持 devm_* 系列自动回收 |
| 推荐使用场景 | 早期内核、快速验证、简单定制板 | 主线驱动开发、模块化平台支持 |
📘 第五部分:案例对比分析
📌 静态绑定代码核心点
- 所有地址/中断号写死
- 所有初始化逻辑集中在
lcd_driver_init() - 无匹配逻辑、无设备结构体、无
struct platform_device
📌 设备模型版本(platform)核心点
of_match_table用于与设备树compatible匹配- 注册为
platform_driver,挂接bus_type probe()自动被调用,完成注册与初始化- 所有资源通过
devm_*自动管理
✅ 总结:为什么设备模型是驱动发展的必然?
静态绑定驱动模型虽然在早期发挥了重要作用,但随着 SoC 架构的复杂化与模块化需求的增强,其硬编码、不可复用的特性逐渐成为负担。
设备模型通过总线、设备、驱动三者的分离与抽象,成功实现了驱动框架的现代化,使得:
- 一个驱动可以匹配多个设备
- 一个设备可以热插拔与自动加载驱动
- 系统可以动态管理设备生命周期
- 用户空间可以通过 sysfs 观察设备状态
这正是现代嵌入式系统与通用 Linux 平台所需的基础能力。
📚 延伸阅读
- Linux Device Model 设计初衷 - Patrick Mochel
- 内核文档:Documentation/driver-model/
- 内核源码:drivers/base/*、include/linux/device.h
- 推荐书籍:《Linux Device Drivers 第三版》《Linux内核设计与实现》
下一篇,我们将结合实际平台(如 i.MX8M、Raspberry Pi)对比分析设备树中的设备节点是如何与驱动匹配的,深入剖析设备模型运行时的数据流结构。