1、背景介绍
实际人工构造物中,很多物体表面为平面结构,因此将点云投影在二维平面上进行处理,如进行点云面积计算、点云边缘提取等。
具体案例可以参考博客:详解基于格网法统计平面点云面积_点云格网法计算xy投影面积-CSDN博客、点云格网过程可视化(C++ PCL)-CSDN博客、
基于格网拓扑关系的边缘点检测-CSDN博客
本博客介绍基于python语言介绍平面点云格网化过程,并对格网进行可视化,让点云数据处理过程更加直观明了,最终效果如下图所示:
 |  |
2、原理介绍
2.1 初始格网化计算
首先统计点云数据的X、Y坐标值的最大值与最小值,分别为Xmin、Xmax、Ymin、Ymax。根据划分的格网尺寸L,确定最小外包矩形可以划分的行与列:
行数=ceil(Xmax-Xmin)/L
列数=ceil(Ymax-Ymin)/L
Ceil()为向上取整函数, 根据计算的覆盖点云的行号、列号,可以知道总的格网数量,这样便于在编写程序时,初始化维度。
****需要注意的是,为了防止出现越界,以及后续数据处理,需要将Xmin、Xmax、Ymin、Ymax适当的向外扩,如
Xmin=Xmin-L
Xmax=Xmax+L
Ymin=Ymin-L
Ymax=Ymax+L
2.2 单个点格网计算
对于每个点P(x,y,z),依据其x、y坐标将该点划入到相应的格网内即可。P点落入的格网编号为:
行号=ceil((x-Xmin)/L)
列号=ceil((y-Ymin)/L)
所有点处理完后,每个格网内包含的点数量不一致,有的格网部包含点,有点包含若干点,这个与点云形状有关。
2.3 格网可视化
每个格网可以看成功一个正方形,因此,格网可视化可以看成将这些格网进行可视化,具体来说,根据格网尺寸L、点云x、y坐标的最小值,即可计算出正方形的四个顶点位置坐标,最终便可实现格网的可视化。
3、代码测试验证
本程序基于python编写,在pycharm上运行。下载代码链接如下,下所包含的测试数据与代码如下图所示:
代码下载链接:https://download.csdn.net/download/qq_32867925/89472916
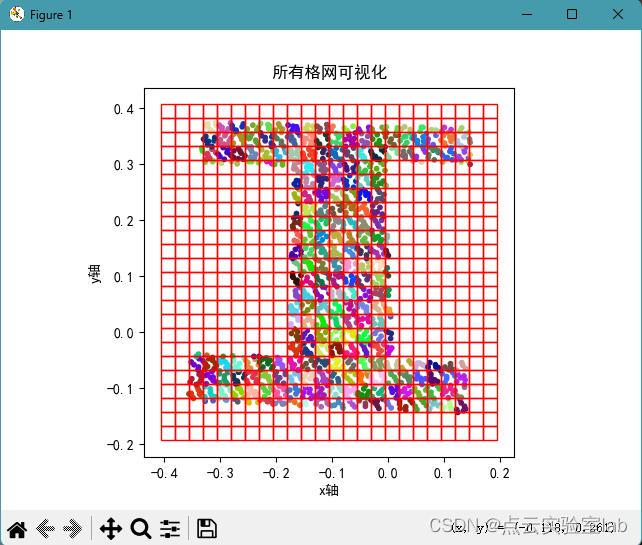
3.1 所有格网可视化
所有格网可视化,即将覆盖点云的最小外包矩形,均匀划分成边长为L的若干正方形,效果如下,构建的格网,在原始点云基础上向外外扩了2层,每个格网大小一样,且属于同一格网内点,颜色相同。且点云颜色变化变化位置与格网边重合。同时,修改格网尺寸,可以得到同样效果,只是格网总数量显著变少。
 |  |
 |  |
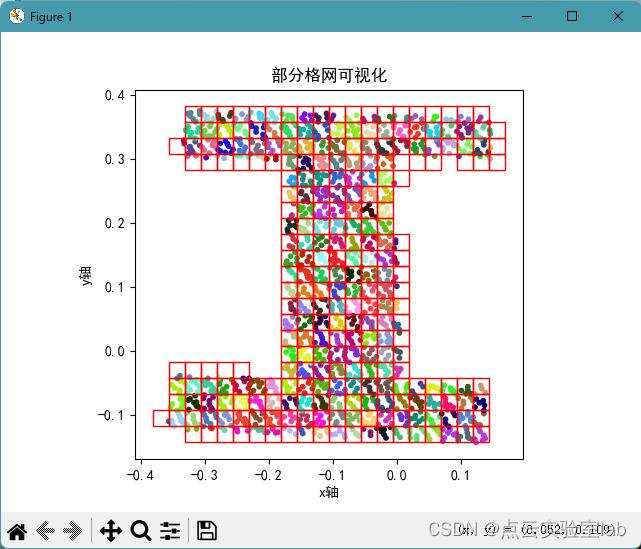
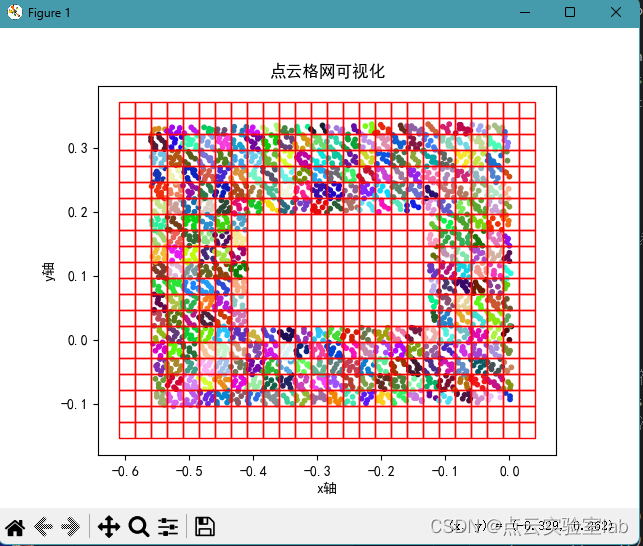
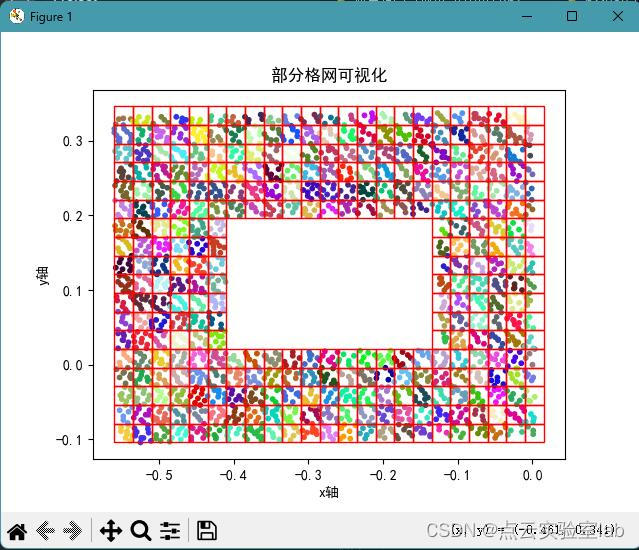
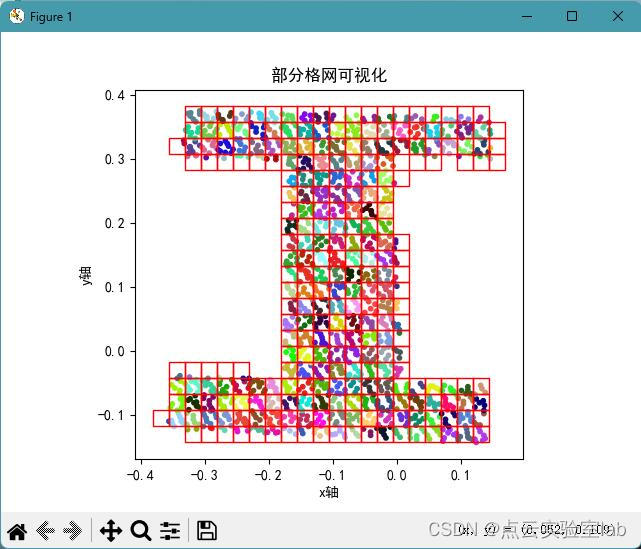
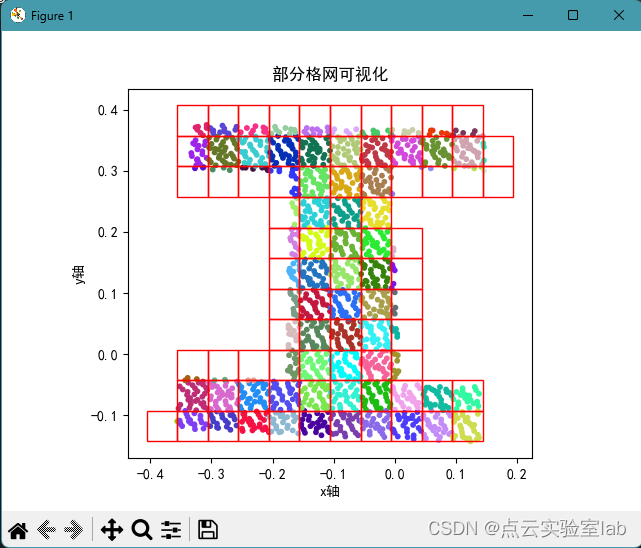
3.2 部分格网可视化
部分格网可视化,是将包含点云的格网进行可视化,不包含点云的格网不进行可视化,效果如下所示。与上面显著不同的是,只包含点的格网进行了可视化,且属于该格网内的点,颜色一致。同时设置不同的格网尺寸,格网数量与分布,存在一定差异。
 |  |
 |  |
4、总结
介绍了基于python的平面点云格网及其可视化原理与过程。需要说明的是,格网可视化,仅仅是数据预处理步骤,便于数据处理。