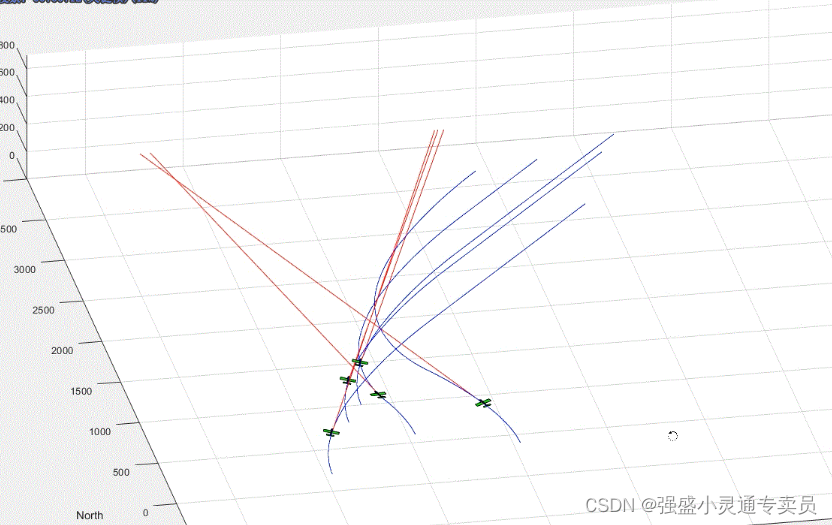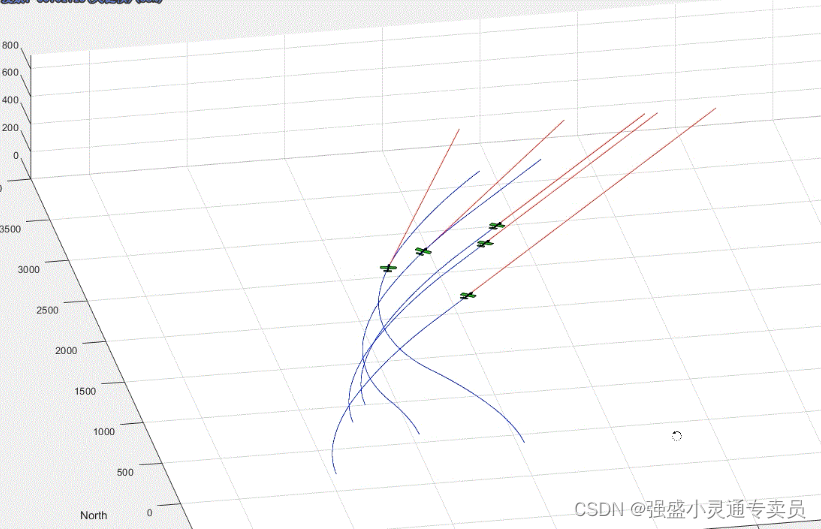
一个小型无人机集群仿真演示平台,使用matlab和simulink搭建。
给出的例子是5架的,当然如果你愿意花时间,也可以把它扩展到10架,20架甚至更多。
输入:5架飞机的规划路径
输出:每架无人机每个时刻的13个状态量

%----------------
uavW = 1;
save('uavW.mat','uavW');
sim('New_mavsim_chap12');ii = 1;
eval(['x' num2str(ii) '= x;'])
eval(['path' num2str(ii) '= path;'])
eval(['waypoints' num2str(ii) '= waypoints;'])save('x1.mat','x1','path1','waypoints1');
%----------------
clear;
uavW = 2;
uavi = uavW;
save('uavW.mat','uavW');
sim('New_mavsim_chap12');ii = 2;
eval(['x' num2str(ii) '= x;'])
eval(['path' num2str(ii) '= path;'])
eval(['waypoints' num2str(ii) '= waypoints;'])
save('x2.mat','x2','path2','waypoints2');
%----------------
clear;
uavW = 3;
save('uavW.mat','uavW');
sim('New_mavsim_chap12');ii = 3;
eval(['x' num2str(ii) '= x;'])
eval(['path' num2str(ii) '= path;'])
eval(['waypoints' num2str(ii) '= waypoints;'])
save('x3.mat','x3','path3','waypoints3');
%----------------
clear;
uavW = 4;save('uavW.mat','uavW');
sim('New_mavsim_chap12');ii = 4;
eval(['x' num2str(ii) '= x;'])
eval(['path' num2str(ii) '= path;'])
eval(['waypoints' num2str(ii) '= waypoints;'])
save('x4.mat','x4','path4','waypoints4');
%----------------
clear;
uavW = 5;
save('uavW.mat','uavW');
sim('New_mavsim_chap12');ii = 5;
eval(['x' num2str(ii) '= x;'])
eval(['path' num2str(ii) '= path;'])
eval(['waypoints' num2str(ii) '= waypoints;'])
save('x5.mat','x5','path5','waypoints5');