V0.0 2024-07-04
V0.1 加入开发环境和PI4关于ROS的环境变量的对比
1.我们可以用env | grep ROS来查看Pi4中的ROS环境变量
如下图所示,不理解的,抛给AI快速了解一下。
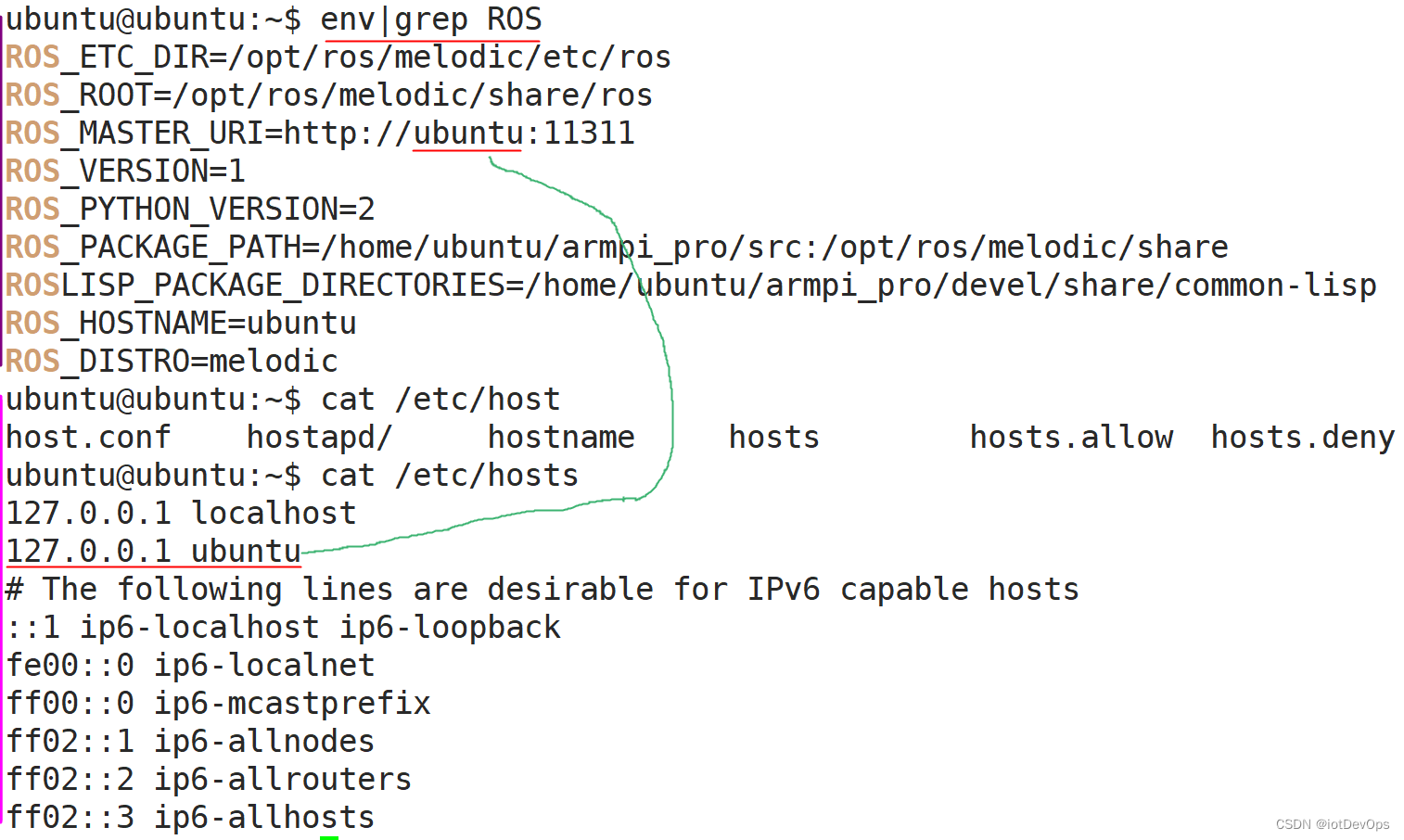
2.ArmPiPro安装的ROS是ROS1-melodic
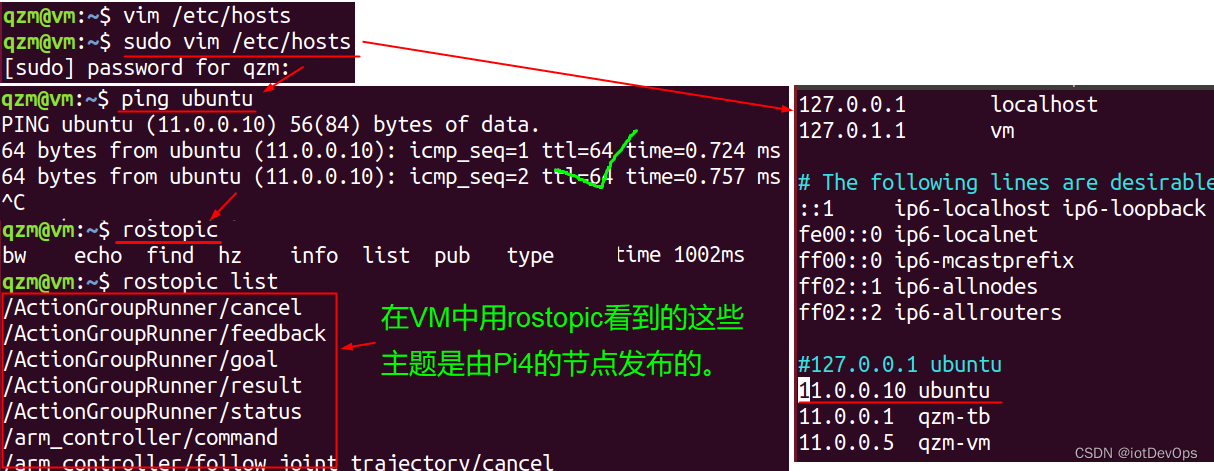
3.在开发时,需要在笔记本电脑上开一个ubuntu18.04虚拟机VM作为ROS机器人开发环境
在VM中安装好ros1-melodic,ROS是分布式系统,可以在VM中开发功能包和运行节点(Node),通过ROS的消息机制和服务机制去和Pi4中的节点进行通信,实现各种功能。在VM中的节点要能找到存在于PI4中的节点管理器,上面的环境变量:ROS_MASTER_URI=http://ubuntu:11311可以不变,但要把VM中的/etc/hosts中的设置改一下,以便正确绑定Pi的IP地址到ubuntu主机名(127.0.0.1 ubuntu改为11.0.0.10 ubuntu)。下面是设置和验证说明:
4.对比一下开发环境VM和PI4的ROS环境变量
