本章记录传统手势识别,在表示0-5六个数值时的识别问题。例如识别剪刀石头布,手势,以及其表示的动作。在识别时将手势中的凹陷区域称为凸缺陷,其个数作为识别的重要依据。
需要注意,在凸缺陷个数为0时,无法识别个数,需要引入凸包的概念,后面会讲到。实际过程中,算法获取凸缺陷时,会获取到细小的凸缺陷,需要将细小的凸缺陷屏蔽。
一.理论基础
1.凸包
凸包(Convex Hull)是(物体最外层)给定点集的最小凸多边形或多面体,包含所有点,并确保多边形内部任意两点的连线也在内部。换句话说,凸包指的是完全包含原有轮廓,并且仅由轮廓上的点构成的多边形。在凸包内可以想象成用橡皮筋围住一组钉在板上的钉子,橡皮筋绷紧后包围的区域即为凸包,任意三个点构成的面向内部的角的角度都小于180°。凸包在计算几何、计算机视觉、图形学等领域有广泛应用。

凸包示意图
重要函数:
(1)cv::convexHull 计算凸包
功能:计算二维点集的凸包,该函数通常用于图像处理和计算几何中,以确定形状的边界。
函数语法:
void cv::convexHull( InputArray points, OutputArray hull,bool clockwise=false, bool returnPoints=true
);
points | 输入的二维点集,可以是 std::vector<cv::Point> 或 cv::Mat 类型。 |
hull | 输出的凸包结果,类型与输入点集相同。 如果 如果为 false,则返回凸包点集的索引。 |
clockwise | 指定输出的凸包点的顺序。 如果为 true,则按顺时针方向排序; 否则按逆时针方向排序。默认值为 false。 |
returnPoints | 指定输出结果的类型。 如果为 true,则返回凸包上的点; 如果为 false,则返回凸包点集的索引。默认值为 true。 |
示例代码:
vector<vector<cv::Point>> contours;cv::findContours(binary, contours, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE);vector<cv::Point> hull;cv::convexHull(contours[0], hull);(2)cv::polylines 绘制多边形
功能:可以用来绘制一组点连接形成的多边形轮廓。
函数语法:
void cv::polylines(
InputOutputArray image,
InputArrayOfArrays hull,
bool isClosed,
const Scalar& color,
int thickness=1,
int lineType=LINE_8,
int shift=0
);
image | 输入输出参数,表示要绘制的图像。 |
pts | 输入参数,表示一个或多个点集的数组,每个点集表示一条多边形线。 |
isClosed | 输入参数,表示多边形是否封闭。 如果为 true,则绘制一个封闭的多边形;否则绘制一条开放的多边形线。 |
color | 输入参数,表示线条的颜色。 |
thickness | (可选)输入参数,表示线条的粗细,默认为 1。 |
lineType | (可选)输入参数,表示线条的类型 LINE_8, LINE_4等。 |
shift | (可选)输入参数,表示点坐标的小数点位数,默认为 0。 |
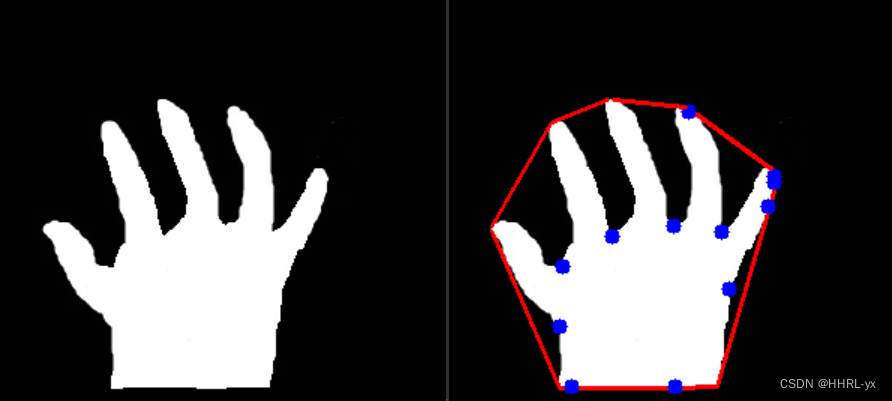
(3)应用示例:绘制图像的凸包
#include <opencv2/opencv.hpp>
#include <iostream>int main() {// 读取并绘制原始图像cv::Mat o = cv::imread("hand.bmp");if(o.empty()) {std::cerr << "Could not open or find the image!" << std::endl;return -1;}cv::imshow("original", o);// 提取轮廓cv::Mat gray;cv::cvtColor(o, gray, cv::COLOR_BGR2GRAY);cv::Mat binary;cv::threshold(gray, binary, 127, 255, cv::THRESH_BINARY);std::vector<std::vector<cv::Point>> contours;std::vector<cv::Vec4i> hierarchy;cv::findContours(binary, contours, hierarchy, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);// 寻找凸包,得到凸包的角点std::vector<cv::Point> hull;cv::convexHull(contours[0], hull);// 绘制凸包cv::polylines(o, hull, true, cv::Scalar(0, 255, 0), 2);// 输出凸包的角点for (const auto& point : hull) {std::cout << point << std::endl;}// 显示凸包cv::imshow("result", o);cv::waitKey(0);cv::destroyAllWindows();return 0;
}
2.凸缺陷
概念:凸缺陷(Convexity Defects)是指形状的凸包与形状之间的区域。这些缺陷表示在形状的边界上向内凹陷的部分。具体来说,凸缺陷是形状的轮廓与其凸包之间的点,这些点与凸包形成的线段是形状的凹陷部分。
通常情况下,使用如下四个特征值来表示凸缺陷:
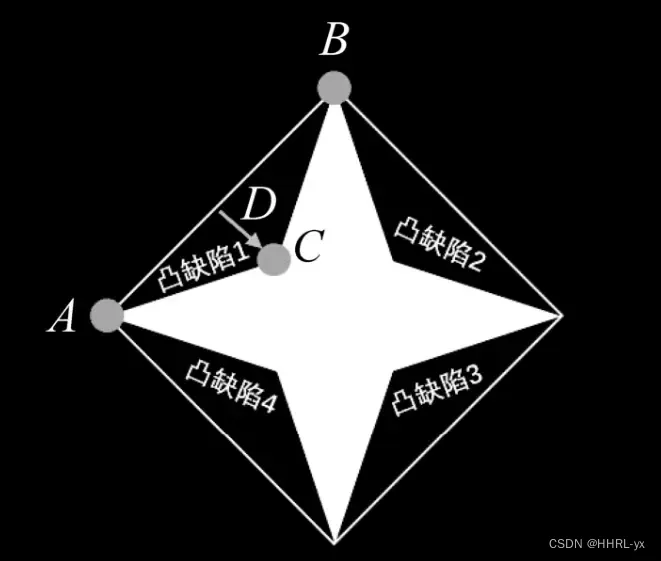
1.起点:该特征值用于说明当前凸缺陷的起点位置。需要注意的是,起点值用轮廓索引表示。也就是说,起点一定是轮廓中的一个点,并且用其在轮廓中的序号来表示。例如,点A是凸缺陷1的起点。
2.终点:该特征值用于说明当前凸缺陷的终点位置。该值也是使用轮廓索引表示的。例如,图中的点B是凸缺陷1的终点。
3.轮廓上距离凸包最远的点:例如,点C是凸缺陷1中的轮廓上距离凸包最远的点。
4.最远点到凸包的近似距离:例如,距离D是凸缺陷1中的最远点到凸包的近似距离。
(1)cv::convexityDefects 计算凸缺陷
功能:计算输入轮廓与其凸包之间的凸缺陷,返回每个凸缺陷的起点、终点、最远点和深度。
函数语法:
void cv::convexityDefects(InputArray contour, InputArray convexhull, OutputArray convexityDefects);
contour | 输入的轮廓点集。 |
convexhull | 输入的凸包点的索引。 |
convexityDefects | 输出的凸缺陷。 |
示例代码:
// 计算凸缺陷
std::vector<cv::Vec4i> defects;
cv::convexityDefects(contours[0], hull, defects);
(2)cv::line 绘制线条
功能:在图像 img 上绘制一条从 pt1 到 pt2 的线条,线条的颜色、粗细和类型可以由相应的参数控制。
函数语法:
void cv::line(Mat& img, Point pt1, Point pt2, const Scalar& color, int thickness=1, int lineType=LINE_8, int shift=0
);
img | 输入/输出图像,在图像上绘制线条。 |
pt1 | 线条的起点,类型为 cv::Point。 |
pt2 | 线条的终点,类型为 cv::Point。 |
color | 线条的颜色,类型为 例如, |
thickness | (可选)线条的粗细,默认为 1。 |
lineType | (可选)线条的类型。 |
shift | 点坐标的小数位数,默认为 0。 |
(3)cv::circle 绘制圆
功能:在图像 img 上绘制一个以 center 为圆心、半径为 radius 的圆,圆的颜色、线条粗细和类型可以由相应的参数控制。
函数语法:
void cv::circle(Mat& img, Point center, int radius, const Scalar& color, int thickness=1,int lineType=LINE_8, int shift=0
);
img | 输入输出图像,在图像上绘制圆。 |
center | 圆心的坐标,类型为 cv::Point。 |
radius | 圆的半径,类型为 int。 |
color | 圆的颜色,类型为 例如, |
thickness | 圆的线条粗细。如果为负值,如 -1,则绘制填充的圆。 |
lineType | 线条的类型。 |
shift | 点坐标的小数位数,默认为 0。 |
(4)应用示例1:一个图像里有单独轮廓
#include <opencv2/opencv.hpp>
#include <iostream>int main() {// 读取图像cv::Mat img = cv::imread("hand.bmp");if (img.empty()) {std::cerr << "Could not open or find the image!" << std::endl;return -1;}cv::imshow("original", img);// 转换为灰度图像cv::Mat gray;cv::cvtColor(img, gray, cv::COLOR_BGR2GRAY);// 二值化cv::Mat binary;cv::threshold(gray, binary, 127, 255, cv::THRESH_BINARY);// 查找轮廓std::vector<std::vector<cv::Point>> contours;std::vector<cv::Vec4i> hierarchy;cv::findContours(binary, contours, hierarchy, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE);// 计算凸包std::vector<int> hull;cv::convexHull(contours[0], hull, false);// 计算凸缺陷std::vector<cv::Vec4i> defects;cv::convexityDefects(contours[0], hull, defects);std::cout << "defects=\n";for (const auto& defect : defects) {std::cout << defect << std::endl;}// 绘制凸缺陷for (size_t i = 0; i < defects.size(); i++) {int s = defects[i][0]; // 起点int e = defects[i][1]; // 终点int f = defects[i][2]; // 远点// int d = defects[i][3]; // 距离(这里未使用)cv::Point start = contours[0][s];cv::Point end = contours[0][e];cv::Point far = contours[0][f];cv::line(img, start, end, cv::Scalar(0, 0, 255), 2);cv::circle(img, far, 5, cv::Scalar(255, 0, 0), -1);}// 显示结果cv::imshow("result", img);cv::waitKey(0);cv::destroyAllWindows();return 0;
}
结果如图:
(5)应用示例2: 一个图像里有很多轮廓
需要对每一个轮廓分别计算凸包和凸缺陷,并将结果绘制在同一张图像上。
#include <opencv2/opencv.hpp>
#include <iostream>
#include <vector>void processImage(cv::Mat& img) {// 转换为灰度图像cv::Mat gray;cv::cvtColor(img, gray, cv::COLOR_BGR2GRAY);// 二值化cv::Mat binary;cv::threshold(gray, binary, 127, 255, cv::THRESH_BINARY);// 查找轮廓std::vector<std::vector<cv::Point>> contours;std::vector<cv::Vec4i> hierarchy;cv::findContours(binary, contours, hierarchy, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE);// 遍历每个轮廓for (size_t i = 0; i < contours.size(); i++) {// 计算凸包std::vector<int> hull;cv::convexHull(contours[i], hull, false);// 计算凸缺陷std::vector<cv::Vec4i> defects;cv::convexityDefects(contours[i], hull, defects);// 绘制凸包std::vector<cv::Point> hullPoints;for (size_t j = 0; j < hull.size(); j++) {hullPoints.push_back(contours[i][hull[j]]);}cv::polylines(img, hullPoints, true, cv::Scalar(0, 255, 0), 2);// 绘制凸缺陷for (size_t j = 0; j < defects.size(); j++) {int s = defects[j][0]; // 起点int e = defects[j][1]; // 终点int f = defects[j][2]; // 远点cv::Point start = contours[i][s];cv::Point end = contours[i][e];cv::Point far = contours[i][f];cv::line(img, start, end, cv::Scalar(0, 0, 255), 2);cv::circle(img, far, 5, cv::Scalar(255, 0, 0), -1);}}
}int main() {// 读取图像cv::Mat img = cv::imread("hand.bmp");if (img.empty()) {std::cerr << "Could not open or find the image!" << std::endl;return -1;}cv::imshow("original", img);// 处理图像processImage(img);// 显示结果cv::imshow("result", img);cv::waitKey(0);cv::destroyAllWindows();return 0;
}
3.凸缺陷与凸包面积比
当有0个凸缺陷时,手势既可能是1也可能是0,所以我们做以下判断:
凸包面积=凸缺陷面积+轮廓面积。
数值0的手势:轮廓/凸包面积> 0.9。
数值1的手势:轮廓/凸包面积≤ 0.9。
应用示例:
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace std;void reg(cv::Mat& img) {cv::Mat gray;cv::cvtColor(img, gray, cv::COLOR_BGR2GRAY);cv::Mat binary;cv::threshold(gray, binary, 127, 255, cv::THRESH_BINARY + cv::THRESH_OTSU);vector < vector<cv::Point>> contours;cv::findContours(binary, contours, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE);//找到最大轮廓/*auto max_contour = std::max_element(contours.begin(), contours.end(), [](const std::vector<cv::Point>& a, const std::vector<cv::Point>& b) {return cv::contourArea(a) < cv::contourArea(b);});*/double max_area = 0;vector<cv::Point> max_contours;for (int i = 0; i < contours.size(); ++i) {double area = cv::contourArea(contours[i]);if (area > max_area) {max_area = area;max_contours = contours[i];}}cout << "Max contour area:" << max_area << endl;vector<cv::Point> hull;cv::convexHull(max_contours, hull);double areahull = cv::contourArea(hull);// 通常情况下,手势0,轮廓和凸包大致相等,该值大于0.9.// 手势1,轮廓要比凸包小一些,该值小于等于0.9double arearatio = max_area / areahull;string result;if (arearatio > 0.9) {result = "fist:0";}else {result = "finger:1";}cv::Point org(0, 80);int font = cv::FONT_HERSHEY_SIMPLEX;double fontScale = 2;cv::Scalar color(0, 0, 255);int thickness = 3;cv::putText(img, result, org, font, fontScale, color, thickness);};
int main() {cv::Mat img1 = cv::imread("zero.jpg");cv::Mat img2 = cv::imread("one.jpg");if (img1.empty() || img2.empty()) {cerr << "error" << endl;return -1;}reg(img1);reg(img2);cv::imshow("zero", img1);cv::imshow("one", img2);cv::waitKey();cv::destroyAllWindows();return 0;
}二.识别过程
1.识别流程
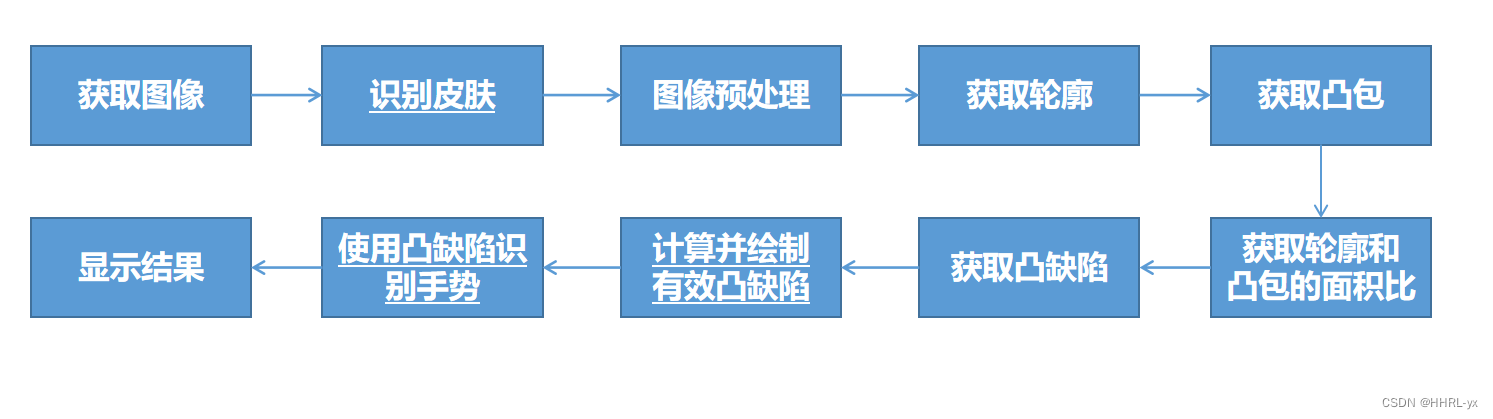
上面为基本流程图,下面介绍具体步骤。
2.具体步骤
(1)获取图像
读取摄像头,划定识别区域,仅在区域里识别手势。
cv::Mat frame;cap.read(frame);if (frame.empty()) break;cv::flip(frame, frame, 1);// 设定一个固定区域作为识别区域cv::Rect roi_rect(400, 10, 200, 200);cv::Mat roi = frame(roi_rect);cv::rectangle(frame, roi_rect, cv::Scalar(0, 0, 255), 0);(2)识别皮肤
本步骤的主要任务是色彩空间转换。将图像从BGR转化为HSV,以进行皮肤检测。
HSV 色彩空间的稳定性
色调(Hue, H):表示颜色的类型,例如红色、绿色等。
饱和度(Saturation, S):表示颜色的纯度。
明度(Value, V):表示颜色的亮度。
皮肤颜色在HSV色彩空间中的色调范围相对稳定,通常集中在一定的色调范围内。在HSV色彩空间中,色调(Hue)对于光照变化和阴影的影响较小,这使得在不同光照条件下,颜色的检测更加稳定。尽管皮肤颜色的亮度和饱和度可能会有所不同,但色调(Hue)变化较小,这使得使用HSV空间可以更有效地检测皮肤。
// 在hsv色彩空间内检测出皮肤cv::Mat hsv;cv::cvtColor(roi, hsv, cv::COLOR_BGR2HSV);cv::Scalar lower_skin(0, 28, 70);cv::Scalar upper_skin(20, 255, 255);cv::Mat mask;cv::inRange(hsv, lower_skin, upper_skin, mask);(3)图像预处理
去除噪声,高斯滤波
// 预处理cv::Mat kernel = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(2, 2));cv::dilate(mask, mask, kernel, cv::Point(-1, -1), 4);cv::GaussianBlur(mask, mask, cv::Size(5, 5), 100);(4)获取轮廓
// 找出轮廓vector<vector<cv::Point>> contours;vector<cv::Vec4i> hierarchy;cv::findContours(mask, contours, hierarchy, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE);double max_area = 0;vector<cv::Point> max_contour;for (int i = 0; i < contours.size(); ++i) {double area = cv::contourArea(contours[i]);if (area > max_area) {max_area = area;max_contour = contours[i];}}(5)获取凸包
vector<cv::Point> hull;cv::convexHull(max_contour, hull);double areahull = cv::contourArea(hull);(6)轮廓与凸包面积比
double arearatio = max_area / areahull;(7)获取凸缺陷
// 获取凸缺陷vector<int> hull_indices;cv::convexHull(max_contour, hull_indices, false);vector<cv::Vec4i> defects;cv::convexityDefects(max_contour, hull_indices, defects);(8)计算并绘制有效凸缺陷
int n = 0; // 凹凸点个数初始值为0// 遍历凸缺陷,判断是否为指间凸缺陷for (size_t i = 0; i < defects.size(); i++) {int s = defects[i][0]; // 起点int e = defects[i][1]; // 终点int f = defects[i][2]; // 远点cv::Point start = (max_contour)[s];cv::Point end = (max_contour)[e];cv::Point far = (max_contour)[f];double a = cv::norm(end - start);double b = cv::norm(far - start);double c = cv::norm(end - far);// 计算手指之间的角度double angle = acos((b * b + c * c - a * a) / (2 * b * c)) * 57;if (angle <= 90 && defects[i][3] > 20) {n++;cv::circle(roi, far, 3, cv::Scalar(255, 0, 0), -1); // 用蓝色绘制最远点}// 绘制手势的凸包cv::line(roi, start, end, cv::Scalar(0, 255, 0), 2);}
(9)使用凸缺陷识别手势
// 通过凸缺陷个数及面积比判断识别结果string result;if (n == 0) {if (arearatio > 0.9) {result = "0";}else {result = "1";}}else if (n == 1) {result = "2";}else if (n == 2) {result = "3";}else if (n == 3) {result = "4";}else if (n == 4) {result = "5";}
(10)显示结果
// 显示识别结果cv::putText(frame, result, cv::Point(400, 80), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(0, 0, 255), 3);cv::imshow("frame", frame);if (cv::waitKey(25) == 27) { // 键盘Esc键退出break;}}cv::destroyAllWindows();cap.release();完整代码:
#include <opencv2/opencv.hpp>
#include <iostream>
#include <cmath>
#include <vector>using namespace std;int main() {cv::VideoCapture cap(0, cv::CAP_DSHOW);if (!cap.isOpened()) {cerr << "Error opening video stream" << endl;return -1;}while (cap.isOpened()) {cv::Mat frame;cap.read(frame);if (frame.empty()) break;cv::flip(frame, frame, 1);// 设定一个固定区域作为识别区域cv::Rect roi_rect(400, 10, 200, 200);cv::Mat roi = frame(roi_rect);cv::rectangle(frame, roi_rect, cv::Scalar(0, 0, 255), 0);// 在hsv色彩空间内检测出皮肤cv::Mat hsv;cv::cvtColor(roi, hsv, cv::COLOR_BGR2HSV);cv::Scalar lower_skin(0, 28, 70);cv::Scalar upper_skin(20, 255, 255);cv::Mat mask;cv::inRange(hsv, lower_skin, upper_skin, mask);// 预处理cv::Mat kernel = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(2, 2));cv::dilate(mask, mask, kernel, cv::Point(-1, -1), 4);cv::GaussianBlur(mask, mask, cv::Size(5, 5), 100);// 找出轮廓vector<vector<cv::Point>> contours;vector<cv::Vec4i> hierarchy;cv::findContours(mask, contours, hierarchy, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE);// 找到最大轮廓/*auto max_contour = max_element(contours.begin(), contours.end(), [](const vector<cv::Point>& a, const vector<cv::Point>& b) {return cv::contourArea(a) < cv::contourArea(b);});double areacnt = cv::contourArea(*max_contour);*/double max_area = 0;vector<cv::Point> max_contour;for (int i = 0; i < contours.size(); ++i) {double area = cv::contourArea(contours[i]);if (area > max_area) {max_area = area;max_contour = contours[i];}}// 获取轮廓的凸包vector<cv::Point> hull;cv::convexHull(max_contour, hull);double areahull = cv::contourArea(hull);// 获取轮廓面积、凸包的面积比double arearatio = max_area / areahull;// 获取凸缺陷vector<int> hull_indices;cv::convexHull(max_contour, hull_indices, false);vector<cv::Vec4i> defects;cv::convexityDefects(max_contour, hull_indices, defects);int n = 0; // 凹凸点个数初始值为0// 遍历凸缺陷,判断是否为指间凸缺陷for (size_t i = 0; i < defects.size(); i++) {int s = defects[i][0]; // 起点int e = defects[i][1]; // 终点int f = defects[i][2]; // 远点cv::Point start = (max_contour)[s];cv::Point end = (max_contour)[e];cv::Point far = (max_contour)[f];double a = cv::norm(end - start);double b = cv::norm(far - start);double c = cv::norm(end - far);// 计算手指之间的角度double angle = acos((b * b + c * c - a * a) / (2 * b * c)) * 57;if (angle <= 90 && defects[i][3] > 20) {n++;cv::circle(roi, far, 3, cv::Scalar(255, 0, 0), -1); // 用蓝色绘制最远点}// 绘制手势的凸包cv::line(roi, start, end, cv::Scalar(0, 255, 0), 2);}// 通过凸缺陷个数及面积比判断识别结果string result;if (n == 0) {if (arearatio > 0.9) {result = "0";}else {result = "1";}}else if (n == 1) {result = "2";}else if (n == 2) {result = "3";}else if (n == 3) {result = "4";}else if (n == 4) {result = "5";}// 显示识别结果cv::putText(frame, result, cv::Point(400, 80), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(0, 0, 255), 3);cv::imshow("frame", frame);if (cv::waitKey(25) == 27) { // 键盘Esc键退出break;}}cv::destroyAllWindows();cap.release();return 0;
}
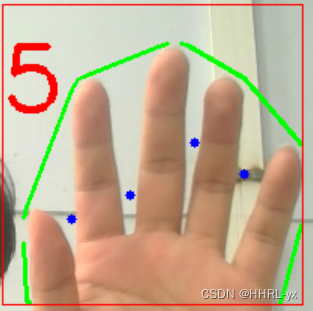
结果如图:
三.剪刀石头布
1.cv::matchShapes 形状匹配
功能:用于比较两个形状相似度的函数。它通过计算两个对象的Hu矩来测量相似度。两个对象可以是轮廓,也可以是灰度图。
函数语法:
| contour1 | 第一个轮廓或灰度图像 |
| contour2 | 第二个轮廓或灰度图像 |
| method | int类型,用于计算相似度的比较方法。常见的方法有:
|
| parameter | 不使用时传入 0 |
代码示例:
#include <opencv2/opencv.hpp>
#include <iostream>using namespace std;int main() {// 读取图像cv::Mat o1 = cv::imread("o1.jpg");cv::Mat o2 = cv::imread("o2.jpg");cv::Mat o3 = cv::imread("o3.jpg");if (o1.empty() || o2.empty() || o3.empty()) {cerr << "Could not open or find the images!" << endl;return -1;}// 转换为灰度图像cv::Mat gray1, gray2, gray3;cv::cvtColor(o1, gray1, cv::COLOR_BGR2GRAY);cv::cvtColor(o2, gray2, cv::COLOR_BGR2GRAY);cv::cvtColor(o3, gray3, cv::COLOR_BGR2GRAY);// 二值化cv::Mat binary1, binary2, binary3;cv::threshold(gray1, binary1, 127, 255, cv::THRESH_BINARY);cv::threshold(gray2, binary2, 127, 255, cv::THRESH_BINARY);cv::threshold(gray3, binary3, 127, 255, cv::THRESH_BINARY);// 查找轮廓vector<vector<cv::Point>> contours1, contours2, contours3;vector<cv::Vec4i> hierarchy;cv::findContours(binary1, contours1, hierarchy, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);cv::findContours(binary2, contours2, hierarchy, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);cv::findContours(binary3, contours3, hierarchy, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);if (contours1.empty() || contours2.empty() || contours3.empty()) {cerr << "Could not find contours in the images!" << endl;return -1;}// 获取第一个轮廓vector<cv::Point> cnt1 = contours1[0];vector<cv::Point> cnt2 = contours2[0];vector<cv::Point> cnt3 = contours3[0];// 形状匹配double ret0 = cv::matchShapes(cnt1, cnt1, 1, 0.0);double ret1 = cv::matchShapes(cnt1, cnt2, 1, 0.0);double ret2 = cv::matchShapes(cnt1, cnt3, 1, 0.0);// 输出结果cout << "o1.shape = " << o1.size() << endl;cout << "o2.shape = " << o2.size() << endl;cout << "o3.shape = " << o3.size() << endl;cout << "相同图像(cnt1,cnt1)的matchShape = " << ret0 << endl;cout << "相似图像(cnt1,cnt2)的matchShape = " << ret1 << endl;cout << "不相似图像(cnt1,cnt3)的matchShape = " << ret2 << endl;// 显示图像cv::imshow("original1", o1);cv::imshow("original2", o2);cv::imshow("original3", o3);cv::waitKey(0);cv::destroyAllWindows();return 0;
}
运行结果:

需要注意,选取轮廓作参数时,仅从原始图像中选取了部分轮廓参与匹配。
而使用灰度图作为参数时,函数使用了更多特征参与匹配,所以结果不一样。
2.剪刀石头布识别
实现程序:图片的剪刀石头布识别
#include <opencv2/opencv.hpp>
#include <iostream>
#include <vector>
#include <algorithm>using namespace std;string reg(const cv::Mat& x) {cv::Mat o1 = cv::imread("paper.jpg");cv::Mat o2 = cv::imread("rock.jpg");cv::Mat o3 = cv::imread("scissors.jpg");if (o1.empty() || o2.empty() || o3.empty()) {cerr << "Could not open or find the images!" << endl;return "";}cv::Mat gray1, gray2, gray3, xgray;cv::cvtColor(o1, gray1, cv::COLOR_BGR2GRAY);cv::cvtColor(o2, gray2, cv::COLOR_BGR2GRAY);cv::cvtColor(o3, gray3, cv::COLOR_BGR2GRAY);cv::cvtColor(x, xgray, cv::COLOR_BGR2GRAY);cv::Mat binary1, binary2, binary3, xbinary;cv::threshold(gray1, binary1, 127, 255, cv::THRESH_BINARY);cv::threshold(gray2, binary2, 127, 255, cv::THRESH_BINARY);cv::threshold(gray3, binary3, 127, 255, cv::THRESH_BINARY);cv::threshold(xgray, xbinary, 127, 255, cv::THRESH_BINARY);vector<vector<cv::Point>> contours1, contours2, contours3, xcontours;vector<cv::Vec4i> hierarchy;cv::findContours(binary1, contours1, hierarchy, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);cv::findContours(binary2, contours2, hierarchy, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);cv::findContours(binary3, contours3, hierarchy, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);cv::findContours(xbinary, xcontours, hierarchy, cv::RETR_LIST, cv::CHAIN_APPROX_SIMPLE);if (contours1.empty() || contours2.empty() || contours3.empty() || xcontours.empty()) {cerr << "Could not find contours in one or more images!" << endl;return "";}vector<cv::Point> cnt1 = contours1[0];vector<cv::Point> cnt2 = contours2[0];vector<cv::Point> cnt3 = contours3[0];vector<cv::Point> cntx = xcontours[0];vector<double> ret;ret.push_back(cv::matchShapes(cntx, cnt1, cv::CONTOURS_MATCH_I1, 0.0));ret.push_back(cv::matchShapes(cntx, cnt2, cv::CONTOURS_MATCH_I1, 0.0));ret.push_back(cv::matchShapes(cntx, cnt3, cv::CONTOURS_MATCH_I1, 0.0));int max_index = min_element(ret.begin(), ret.end()) - ret.begin();string result;if (max_index == 0) {result = "paper";} else if (max_index == 1) {result = "rock";} else {result = "scissors";}return result;
}int main() {cv::Mat t1 = cv::imread("test1.jpg");cv::Mat t2 = cv::imread("test2.jpg");cv::Mat t3 = cv::imread("test3.jpg");if (t1.empty() || t2.empty() || t3.empty()) {cerr << "Could not open or find the test images!" << endl;return -1;}// 输出识别结果cout << reg(t1) << endl;cout << reg(t2) << endl;cout << reg(t3) << endl;// 显示处理结果cv::Point org(0, 60);int font = cv::FONT_HERSHEY_SIMPLEX;double fontScale = 2;cv::Scalar color(255, 255, 255);int thickness = 3;cv::putText(t1, reg(t1), org, font, fontScale, color, thickness);cv::putText(t2, reg(t2), org, font, fontScale, color, thickness);cv::putText(t3, reg(t3), org, font, fontScale, color, thickness);cv::imshow("test1", t1);cv::imshow("test2", t2);cv::imshow("test3", t3);cv::waitKey(0);cv::destroyAllWindows();return 0;
}
拓展:摄像头使用凸缺陷识别剪刀石头布
#include <opencv2/opencv.hpp>
#include <iostream>
#include <cmath>int main() {cv::VideoCapture cap(0, cv::CAP_DSHOW);if (!cap.isOpened()) {std::cerr << "Error: Could not open camera." << std::endl;return -1;}while (true) {cv::Mat frame;cap >> frame;if (frame.empty()) {std::cerr << "Error: Could not read frame." << std::endl;break;}cv::flip(frame, frame, 1);cv::Rect roi_rect(400, 10, 200, 200);cv::Mat roi = frame(roi_rect);cv::rectangle(frame, roi_rect, cv::Scalar(0, 0, 255), 2);cv::Mat hsv;cv::cvtColor(roi, hsv, cv::COLOR_BGR2HSV);cv::Scalar lower_skin(0, 28, 70);cv::Scalar upper_skin(20, 255, 255);cv::Mat mask;cv::inRange(hsv, lower_skin, upper_skin, mask);cv::Mat kernel = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(2, 2));cv::dilate(mask, mask, kernel, cv::Point(-1, -1), 4);cv::GaussianBlur(mask, mask, cv::Size(5, 5), 100);std::vector<std::vector<cv::Point>> contours;cv::findContours(mask, contours, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE);if (contours.empty()) continue;auto cnt = *std::max_element(contours.begin(), contours.end(), [](const std::vector<cv::Point>& a, const std::vector<cv::Point>& b) {return cv::contourArea(a) < cv::contourArea(b);});double areacnt = cv::contourArea(cnt);std::vector<cv::Point> hull;cv::convexHull(cnt, hull);double areahull = cv::contourArea(hull);double arearatio = areacnt / areahull;std::vector<int> hull_indices;cv::convexHull(cnt, hull_indices, false);std::vector<cv::Vec4i> defects;cv::convexityDefects(cnt, hull_indices, defects);int n = 0;for (const auto& defect : defects) {cv::Point start = cnt[defect[0]];cv::Point end = cnt[defect[1]];cv::Point far = cnt[defect[2]];double a = cv::norm(end - start);double b = cv::norm(far - start);double c = cv::norm(end - far);double angle = std::acos((b * b + c * c - a * a) / (2 * b * c)) * 57;if (angle <= 90 && defect[3] > 20) {n++;cv::circle(roi, far, 3, cv::Scalar(255, 0, 0), -1);}cv::line(roi, start, end, cv::Scalar(0, 255, 0), 2);}std::string result;if (n == 0) {result = (arearatio > 0.9) ? "Rock" : "Invalid";} else if (n == 1 || n == 2) {result = "Scissors";} else if (n == 4) {result = "Paper";} else {result = "Invalid";}cv::putText(frame, result, cv::Point(400, 80), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(0, 0, 255), 3);cv::imshow("frame", frame);if (cv::waitKey(25) == 27) break; // Exit on ESC key}cv::destroyAllWindows();cap.release();return 0;
}